前言
在全球能源日益緊縮與淨零政策推動下,製造業面臨轉型壓力,工廠除須維持穩定產能與品質,更需有效控管能源以降低成本並回應永續需求,然而能源消耗不僅來自大型設備,日常人員移動、物料搬運與巡檢等動線同樣累積可觀隱性能耗,若長期忽略將形成營運負擔。傳統路徑規劃多以最短距離為考量,較少納入能源因素,近年節能措施亦偏重設備與管理層面,對既有動線缺乏系統化優化方法,因此本技術著眼於工廠內部路徑規劃的節能潛力,透過分析空間配置與能源使用行為,找出兼顧實務需求與低能耗的作業路徑,協助在不大幅變動產線的前提下逐步導入改善,使節能由設備層級延伸至整體流程與動線管理,回應前述轉型挑戰並為智慧製造發展提供具體方向。
計畫目標
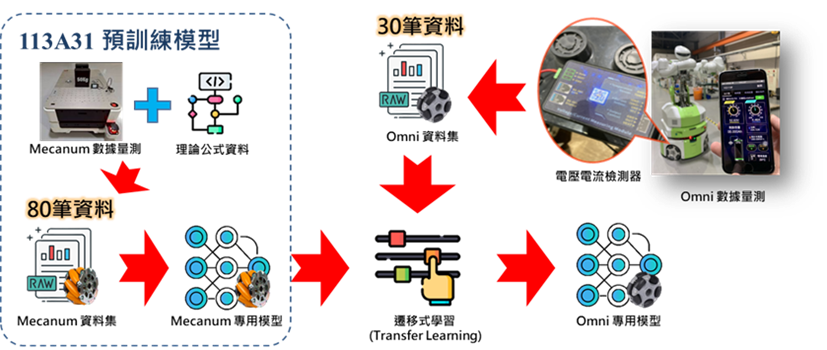
本計畫旨在建構結合機器學習與路徑規劃之智慧節能技術,強化工廠日常作業中的能源管理能力,並以既有輪型能耗預測模型為基礎,導入遷移式學習機制,使模型能快速適應不同輪型與使用情境,提升預測彈性與通用性。同時整合場域地形資訊與路徑平滑化結果,評估各路徑之能耗差異,規劃出兼顧低能耗與實務需求的作業方案,如圖一所示,進一步將節能由設備層級延伸至流程與動線管理,為工廠邁向智慧製造奠定基礎。
 圖一、技術實施規劃
圖一、技術實施規劃
不同輪型的遷移式學習(Transfer Learning)
以計畫前期技術之麥克拉姆輪(Mecanum Wheel)既有能耗預測模型為基礎,採用遷移式學習策略,將模型拓展至適用於全向輪(Omni Wheel)的能耗預測需求,流程如圖二。在訓練設計上,團隊將麥克拉姆輪模型指定為預訓練模型,並以全向輪數據進行遷移式學習,訓練數據(表一)需求僅約為原預訓練數據量的40%(約30筆)。
 圖二、時間能耗預測模型遷移式學習流程
圖二、時間能耗預測模型遷移式學習流程
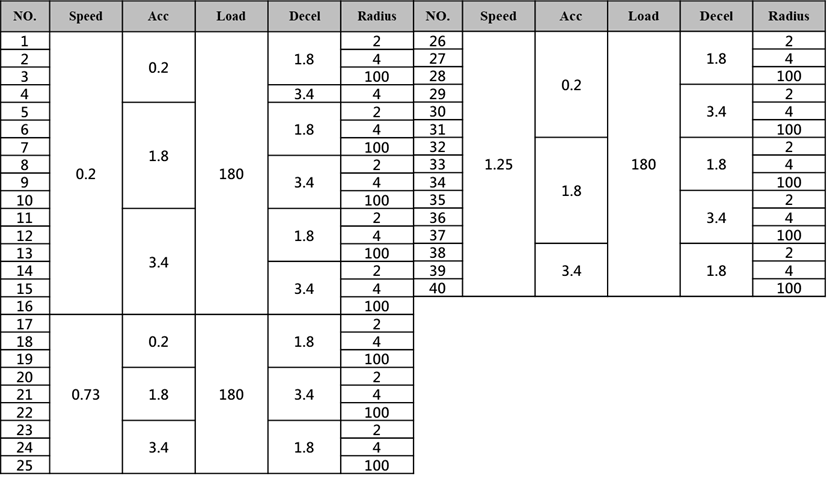 表一、實驗設計因子表
表一、實驗設計因子表
針對遷移式學習的微調方法,團隊進一步設計五組實驗方案(重新訓練、特徵提取、模型截斷、新增自訂層、部分微調)進行驗證與比較,以評估模型在不同設定下的適用性與效能。
重新訓練
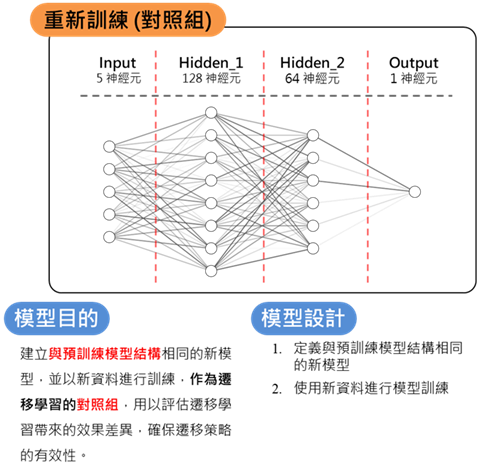
建立與預訓練模型結構相同的新模型(圖三),並以新資料進行訓練,作為遷移學習的對照組,用以評估遷移學習帶來的效果差異,確保遷移策略的有效性。
 圖三、重新訓練方法模型概念
圖三、重新訓練方法模型概念
特徵提取
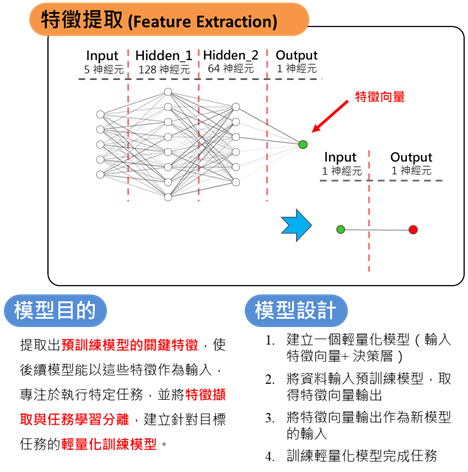
提取出預訓練模型的關鍵特徵(圖四),使後續模型能以這些特徵作為輸入,專注於執行特定任務,並將特徵擷取與任務學習分離,建立針對目標任務的輕量化訓練模型。
 圖四、特徵提取方法模型概念
圖四、特徵提取方法模型概念
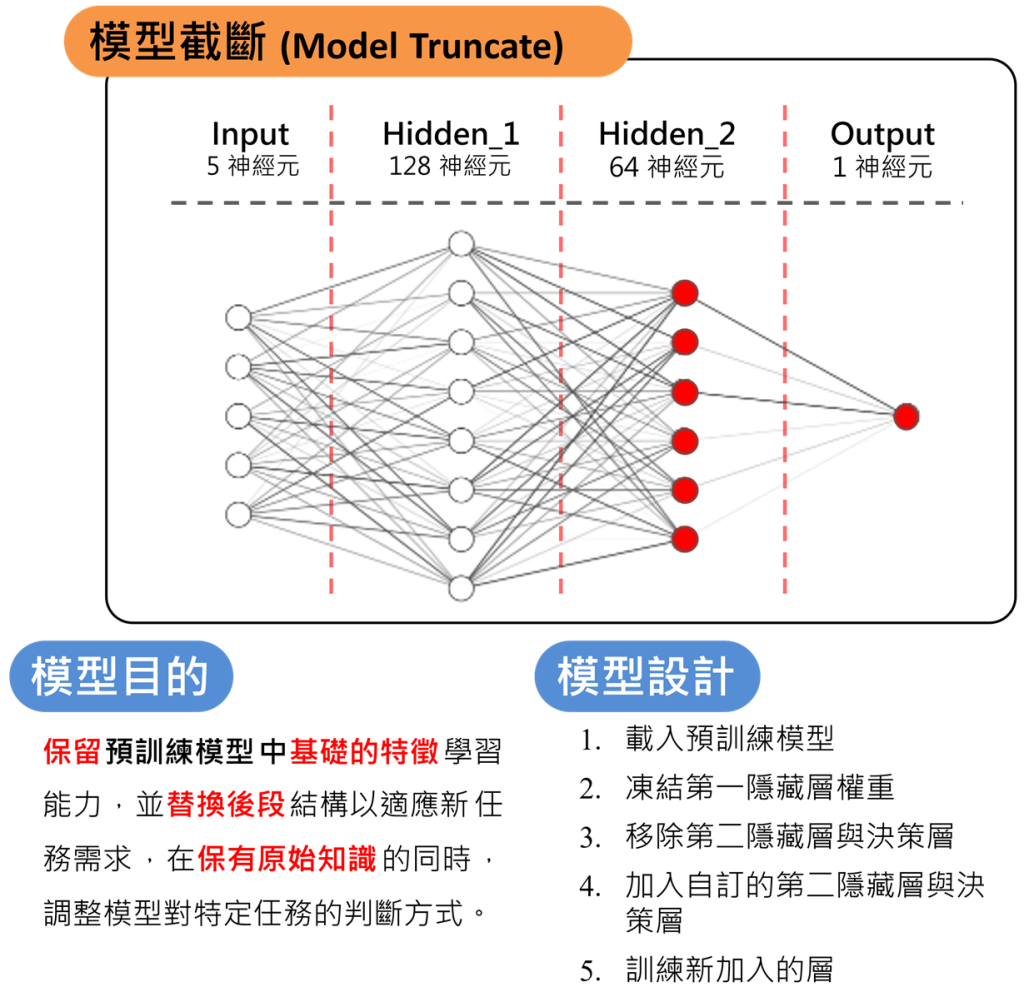
模型截斷
保留預訓練模型中基礎特徵學習能力,替換後段結構以適應新任務需求(圖五),保有原始知識並調整模型對特定任務的判斷方式。
 圖五、模型截斷方法模型概念
圖五、模型截斷方法模型概念
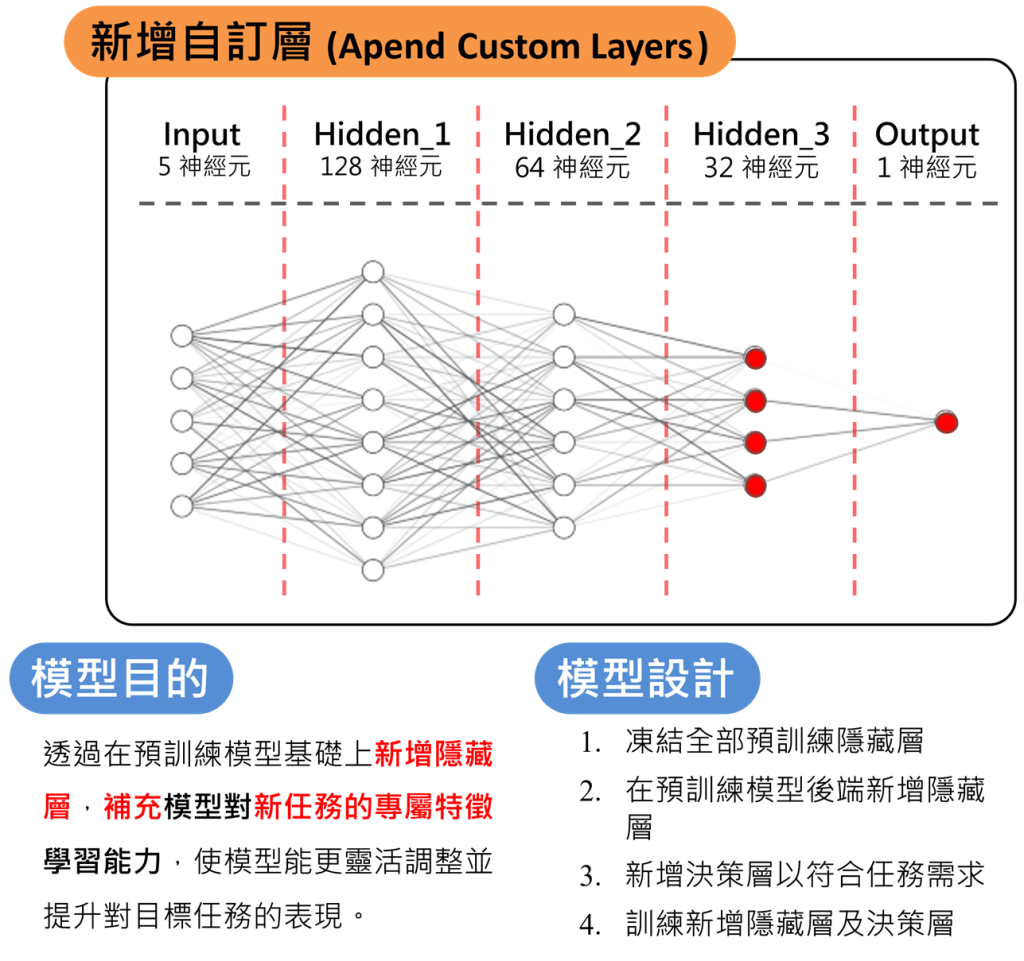
新增自訂層
透過在預訓練模型基礎上新增隱藏層(圖六),補充模型對新任務的專屬特徵學習能力,使模型能更靈活調整並提升對目標任務的表現。
 圖六、新增自訂層方法模型概念
圖六、新增自訂層方法模型概念
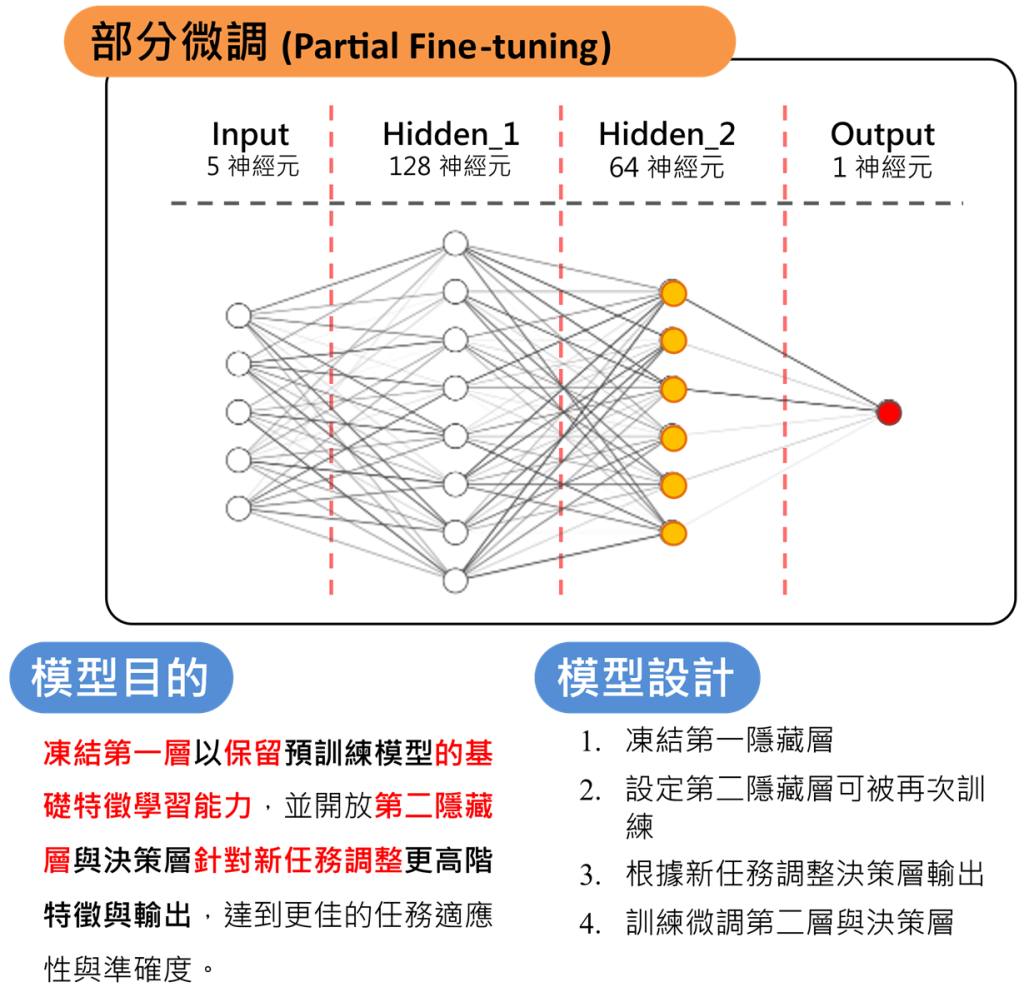
部分微調
凍結第一層以保留預訓練模型的基礎特徵學習能力,並開放第二隱藏層與決策層針對新任務調整更高階特徵與輸出(圖七),達到更佳的任務適應性與準確度。
 圖七、部分微調方法模型概念
圖七、部分微調方法模型概念
小結
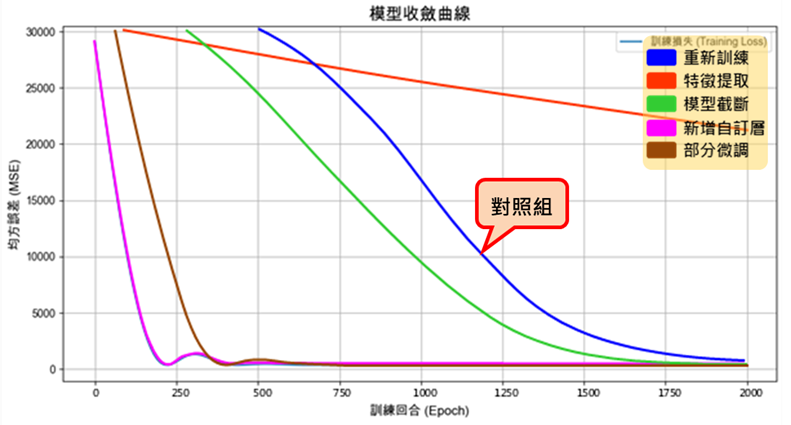
實驗結果如圖八所示,若過度依賴 Mecanum 模型,可能干擾 Omni 模型新任務的學習並降低效能;相較之下,採用「凍結底層、微調中高層」的轉移策略,能保留原模型知識並有效適應 Omni 輪特性,展現良好泛化能力與遷移效果。
且由於兩者運動模式相似,透過遷移學習,僅需原始資料量 40%,即可獲得良好準確度,縮減訓練時間達 72%。
最終模型達到 89.73% 的預測準確率,成果不僅降低資料收集成本與訓練時間,也驗證了遷移學習於不同輪型能耗預測的可行性,為後續多輪型車輛能耗管理與智慧排程奠定技術基礎。
 圖八、各實驗模型收斂曲線
圖八、各實驗模型收斂曲線
節能路徑規劃
在能耗預測模型完成並驗證可行性後,為進一步提升車輛運行效率,團隊著手開發節能路徑規劃方法。具體構想為在傳統 A* 演算法的基礎上,導入能耗權重作為評估指標,使路徑搜尋不僅考量距離與時間,亦能兼顧能耗表現,進而達成節能化的路徑規劃目標。
節能路徑(EA*)的評估函數如下:
其中 g(n) 為從起點到節點n的實際成本(包含基本移動成本+能耗成本), h(n) 為節點到終點的估計成本, d 為距離估計, e 為能耗估計。
節能路徑規劃方法,主要步驟如圖九流程圖所示:首先,設定環境中障礙物及 AGV 的安全距離,並將其轉換為 A* 演算法可用的限制條件。接著,從當前節點開始,辨識八個方向的相鄰節點,並針對每個節點進行成本評估。成本計算分為兩部分:其一為從起點至該節點的累積成本 g(n) ,包含移動成本與能耗成本;其二為從該節點至終點的估計成本 h(n) ,其中距離估計與能耗估計分別以 0.3 與 0.7 的比例加權。然後,將兩者相加得到總成本 f(n) ,並選擇總成本最低的節點作為下一步。演算法持續重複此過程,直到成功生成兼顧能耗與安全性的完整路徑。
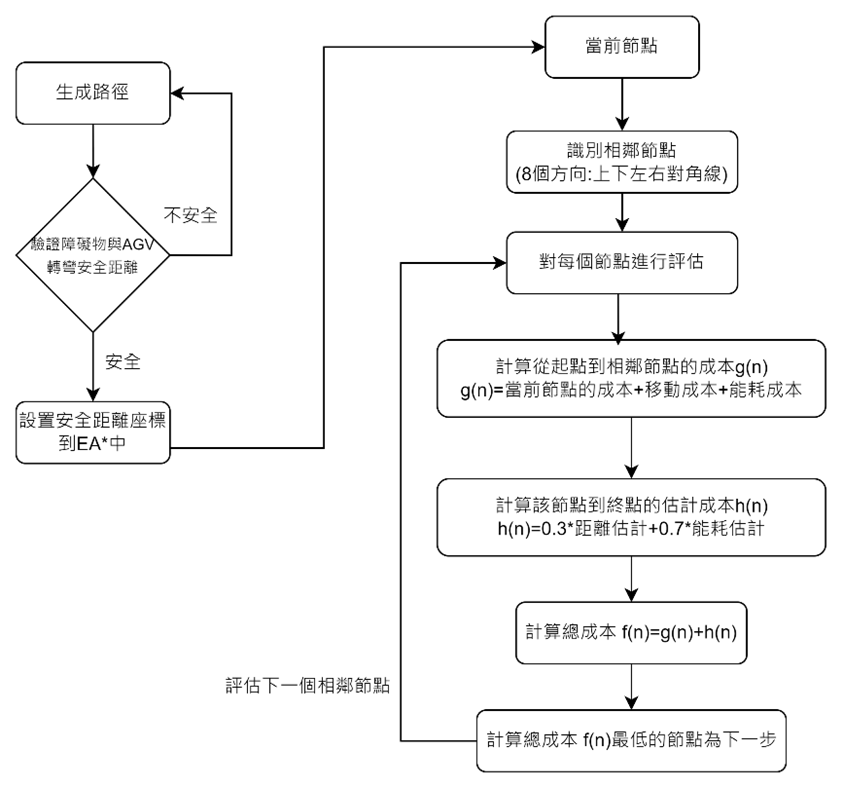 圖九、EA*路徑規劃流程
圖九、EA*路徑規劃流程
經實驗驗證(表二),所提出之節能路徑演算法在多組測試情境下皆展現穩定效果,相較於僅以距離最短為目標的傳統 A* 演算法,能有效降低整體能耗。結果顯示,節能比例約落在 8% 至 11% 之間,說明在不影響路徑可行性的前提下,能兼顧運行效率與能源使用效益,達成節能導航之目標。
| A*能耗 (Wh) |
EA*能耗 (Wh) |
相較A*節能比例 |
| 137.97 |
123.13 |
10.76% |
| 139.88 |
123.80 |
11.50% |
| 75.97 |
68.88 |
9.33% |
| 115.85 |
106.17 |
8.36% |
表二、A*與EA*能耗比較表
最佳節能路徑規劃與平滑化
由於 EA* 演算法所生成的路徑常包含過多轉折,無人車在行駛過程中容易因頻繁轉向而出現停頓與再加速的情況,進而增加不必要的能耗。若欲在既有節能規劃的基礎上進一步提升效率,必須對路徑進行平滑化處理。
然而,單純透過節點刪減或三階樣條函數往往不足,如圖十所示,因不同轉折角度所需刪減的節點數量並不一致,若僅依固定規則處理,可能導致路徑偏離合理走向甚至穿越障礙物;而僅依樣條函數則可能在環境邊界處產生不具可行性的曲線。因此,本研究採用環境障礙物排列之趨勢作為依據,進行動態調整,以確保路徑在平滑化後仍符合可行區域與實際行駛需求,同時達到進一步的節能效果。
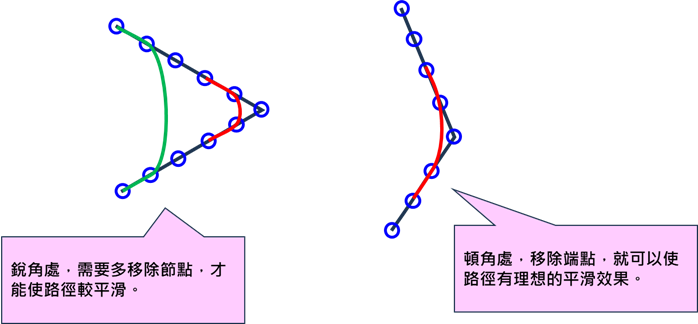 圖十、刪減節點平滑化示意圖
圖十、刪減節點平滑化示意圖
a. 首先透過前面小節提到的能耗預測模型,將該模型的預測結果被納入 A* 演算法的權重設計中,使得路徑規劃在避免障礙的同時,也能有效降低能源消耗,形成一條具備節能導向的初始路徑,如圖十一所示。
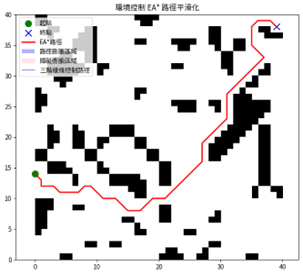 圖十一、透過EA*規劃搬運路徑
圖十一、透過EA*規劃搬運路徑
b. 在獲得初始路徑後,將其進行兩倍車體尺寸的膨脹,以模擬真實運行時的空間需求,如圖十二所示。凡是在膨脹範圍內被觸及的障礙物,皆被定義為環境特徵,藉此反映路徑周圍與車體行駛相關的限制條件。
 圖十二、膨脹已規劃完成的EA*
圖十二、膨脹已規劃完成的EA*
c. 為了進一步確保安全性,這些環境特徵再經過一次等同於車體尺寸的膨脹處理,並被設定為控制依據,如圖十三所示。此設計能有效保留必要的緩衝區,避免後續路徑在調整或平滑化時產生過於貼近障礙物的問題。
 圖十三、將膨脹路徑觸碰的障礙物再次膨脹
圖十三、將膨脹路徑觸碰的障礙物再次膨脹
d. 隨後,針對經膨脹處理後的障礙物區塊進行群組劃分,並從中擷取出位於路徑膨脹範圍內的凸包節點,如圖十四所示。這些節點扮演候選控制點的角色,為後續篩選與生成控制路徑提供基礎。
 圖十四、選擇候選特徵節點
圖十四、選擇候選特徵節點
e. 在候選點確立後,透過 RDP 演算法(Ramer–Douglas–Peucker Algorithm)挑選出具代表性的關鍵節點,如圖十五所示,藉以降低冗餘資訊,並凸顯路徑的主要結構。此過程使控制路徑的特徵更加清晰,同時保持一定的運算效率。
 圖十五、將關鍵節點以三階樣條函數生成控制曲線
圖十五、將關鍵節點以三階樣條函數生成控制曲線
RDP演算法的運作方式是先連接折線的起點與終點形成一條基準線,再計算其他點到該直線的最遠距離,若最大距離大於設定的容差閾值,則保留該點並將折線分為兩段,重複上述過程;若距離在容差範圍內,則刪除中間點。這樣的遞迴計算,能逐步簡化折線,最後得到精簡但仍近似原始形狀的結果,如圖十六所示。
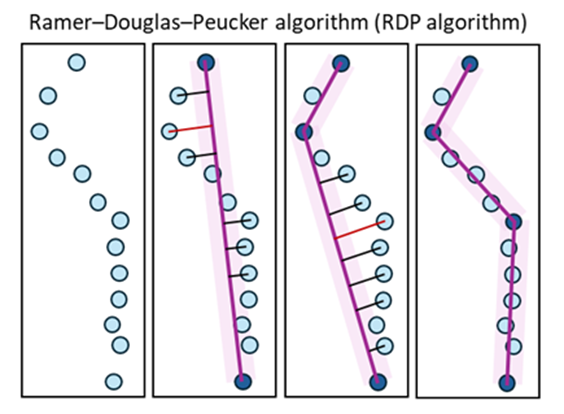 圖十六、RDP演算法示意
圖十六、RDP演算法示意
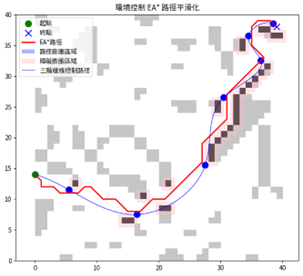
f. 完成關鍵節點的選取後,利用三階樣條函數將這些節點串接成曲線,如圖十七所示。該曲線不僅展現出自然且連續的路徑形態,也能夠忠實反映環境中障礙物排列所隱含的曲率趨勢,達到平滑化效果。
 圖十七、透過投影生成平滑化路徑
圖十七、透過投影生成平滑化路徑
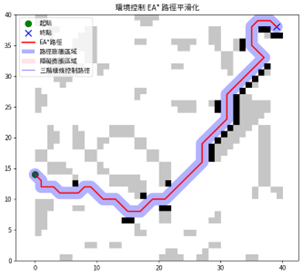
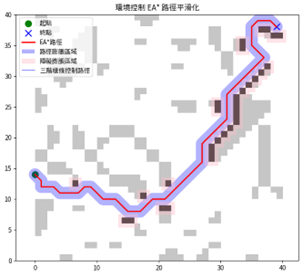
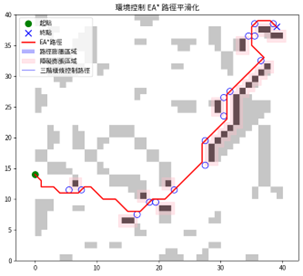
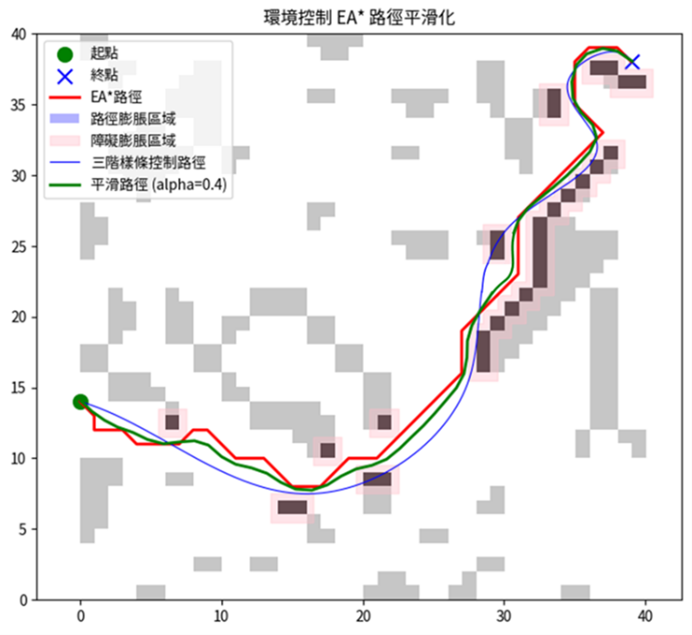
g. 最後,將初始的節能路徑投影至控制曲線上,並以自動網格搜尋法(Grid Search)設定投影權重進行逼近,如圖十八所示。此設計在能耗表現與平滑度之間取得平衡,最終生成一條兼具節能效益與可行性的最佳化平滑路徑。
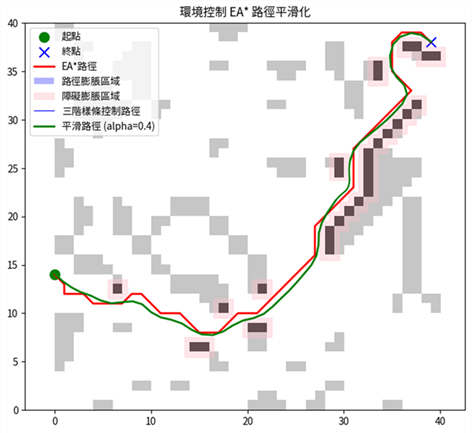 圖十八、平滑化EA*(綠)與EA*(紅)比較
圖十八、平滑化EA*(綠)與EA*(紅)比較
綜合實驗驗證(表三),所提出的方法在場域中可有效降低車輛運行能耗,在路徑平滑化前,即透過能耗模型輔助的EA* 規劃,已能比傳統 A* 節省約 11.2% 的能耗;在完成平滑化後,能耗降低幅度進一步提升至 16.4%。此效益的主要原因,一方面來自路徑長度減少約 1.4%,降低了不必要的移動距離,另一方面則歸因於轉彎次數與角度的減少,減少了車體在轉向時的停頓與額外耗能,最終展現兼顧平滑性與節能的優化效果。
| Algorithm |
Path (m) |
Energy (Wh) |
Time (s) |
Improve (%) |
| Origin A* |
14.381 |
4.09 |
71.9 |
0 |
| Energy A* |
14.137 |
3.63 |
68.2 |
-11.2 |
| Smooth Energy A* |
13.940 |
3.03 |
60.5 |
-16.4 |
表三、平滑化EA*節能效益
結論
本研究提出一套以能耗為核心之移載設備軌跡最佳化系統,結合遷移式學習能耗預測、節能導向路徑規劃與環境感知式路徑平滑化方法。系統以麥克拉姆輪能耗模型為基礎,透過遷移學習快速擴展至全向輪應用,並將能耗納入路徑搜尋與運動調整流程,以降低整體能耗並提升運行效率。
透過本研究所提出之技術,可達成之量化成果如下:
- 採用凍結底層並微調中高層之遷移式學習策略,僅需約 40% 原始訓練資料即可完成全向輪能耗預測模型建構,模型預測準確率達 89.73%,訓練時間較完整重訓縮短約 72%。
- 以 A* 演算法為基礎,調整其成本評估方式,將能耗預測結果納入節點成本計算,並透過自動網格搜尋法決定距離與能耗權重,所提出之 EA* 路徑規劃方法相較傳統最短路徑 A* 可降低整體能耗約 8% 至 11%。
- 實驗結果顯示,經路徑平滑化後,整體能耗降低幅度由原 EA* 的 11.2% 提升至 16.4%,同時路徑長度平均減少約 1.4%,轉彎次數與轉角明顯降低。
透過本研究提出之方法,可建立一套可實際部署之節能導航技術架構,為未來智慧物流、AMR 與多輪型無人車系統在能耗管理與智慧調度上的應用提供具體且可擴充之技術基礎。