邁向市場的通行證:透過ISO 18646標準化性能測試與實驗室驗證,建立移動機器人品牌公信力
文/機器人技術部 陳偉民、吳尚錏、林旻頡、吳建南
摘要
移動機器人(含AMR、AGV與服務型移動平台)正從「概念可行」邁向「規模化落地」。然而,市場端對於移動機器人的採購與導入評估,長期存在一個不易跨越的落差,即是廠商多以規格書、示範影片或情境展示作為性能證明,但終端用戶真正關心的是在其場域中能否穩定、安全且可預期地運作,包括平地速率、停止距離、轉向需求、門檻與地面高度差跨越、坡道可行進斜率與速率、姿態重現與準確度、環境感知與避障行為等。當性能描述缺乏一致定義、測試條件與方法不透明、量測儀器與不確定度未被管控時,導入風險便被迫轉嫁給用戶,形成採購延遲、驗收爭議與品牌信任不足。
本文以ISO 18646-1(輪型機器人移動性能)與ISO 18646-2(導航、感知與避障相關性能)為主軸,提出一套「以標準化性能測試作為市場通行證」的論述框架,一方面以國際標準建立共通語言,使性能指標可比、可驗證;另一方面透過第三方檢測實驗室的客觀量測,將研發端的自我宣稱轉化為可追溯的測試證據,提升終端客戶對產品性能的信任與認同。本文亦指出,精機中心檢測實驗室可提供第三方客觀檢測服務,並透過研討會分享核心要點,協助業者避免不當量測方法、縮短研發時程並提升效率,並作為推動產業導入與建立公信力的節點角色。
本文依測試項目分段說明各指標之檢測意義、試驗配置、量測方法、判定方式與常見陷阱,並延伸討論ISO/IEC 17025架構下的量測溯源與品質管理如何支撐第三方公信力。最後,本文提出面向AI化與跨國競爭的趨勢判斷,未來移動機器人導入大型企業或跨境供應鏈,不僅安規可能被要求第三方驗證,移動性能亦可能逐步走向「強制或準強制」的第三方檢測,成為品牌競爭的基本門檻。
前言
移動機器人產業趨勢、缺口與解決方案
移動機器人近年快速進入物流、製造、醫療、商用服務與公共空間等多元情境。根據Research and Markets報告指出,全球機器人市場可依類型區分為工業機器人、協作機器人、服務機器人與移動機器人,並將此處討論的移動機器人視服務機器人與移動機器人為主要範疇(以市場報告對「非用於製造用途的移動機器人」之定義為服務型機器人)。同時,本文亦整理了市場成長數據與趨勢:以AMR為例,2023 年市場規模與後續成長預測呈現持續擴張,並以不同研究機構對CAGR與市場價值的預估,反映出需求端正快速擴大,如圖一至圖二所示。
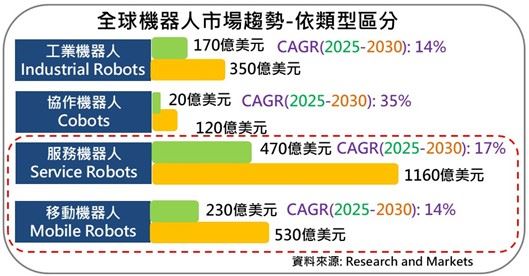 圖一、全球移動機器人市場依類型區分
圖一、全球移動機器人市場依類型區分
 圖二、全球市場依使用者需求分類
圖二、全球市場依使用者需求分類
然而,市場成長並不等於產品導入順暢。對終端用戶而言,移動機器人導入牽涉到產線節拍、倉儲動線、人機共存安全、場域地坪條件、坡道、門檻與狹窄通道等多種變因。當廠商對性能的描述不一致,或採用自訂測試手法,常見結果是:
- 採購端缺乏可比較基準:同樣標示「1.5 m/s」的最大速率,在不同地坪、負載、控制模式與量測區間下,可能代表截然不同的實際能力。
- 驗收端缺乏共同判定方式:煞車停止距離到底以何時刻為「開始煞車」、以何位置為「停止完成」,若沒有共通定義,現場驗收容易出現爭議。
- 導入端風險轉嫁:若在實際場域才發現轉向寬度不足、坡道速度不穩、門檻跨越失敗、定位誤差累積或避障行為不可預期,成本往往由用戶與系統整合商承擔。
因此,產業缺口可濃縮為一句話:缺乏可重複、可追溯、可比較的性能證據。解方是引入 ISO 18646 系列,以標準化的性能指標與試驗方法建立共同語言,並結合第三方檢測實驗室,讓性能從「宣稱」轉為「證據」,在市場需求擴大、產品多元化時,可有效建立公信力並加速導入(如圖三)。補充:國內自主移動機器人聯盟(AMRA)亦已發布 AMRA-201、AMRA-220、AMRA-271 及 TARS/AMRA-300 等標準/指引,可作為產業檢測與導入之重要參考,並協助與國際方法接軌。
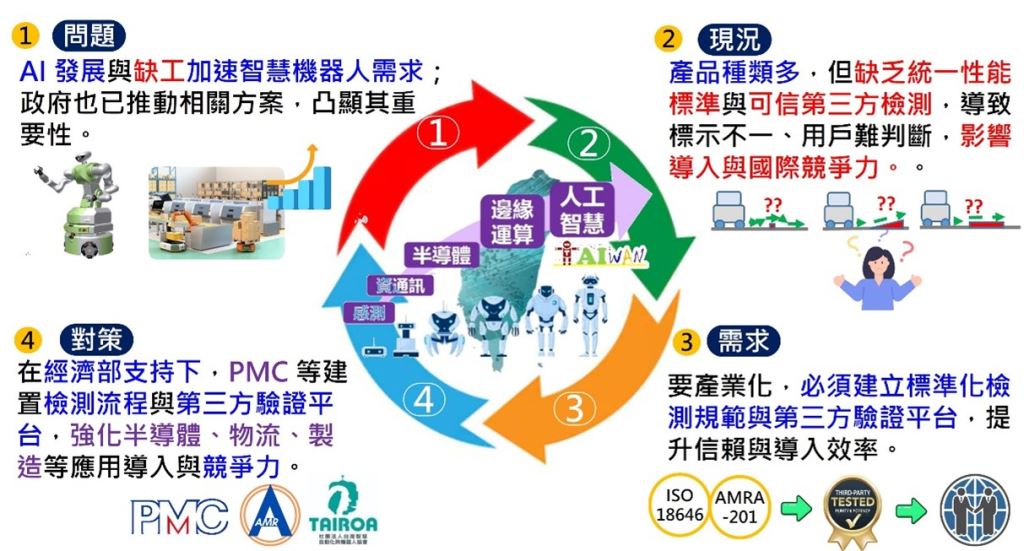 圖三、產業趨勢與缺口
圖三、產業趨勢與缺口
從品牌角度看,性能檢測不是「被動應付」的成本,而是「主動建立信任」的投資。標準化報告能夠:
- 讓國內外客戶用相同語言閱讀性能;
- 讓研發迭代有量化目標與回歸測試依據;
- 讓售前評估與售後爭議回到可查證的測試事實;
- 形成產品系列化、型錄化與跨場域複製的基礎。
移動機器人檢測實驗室介紹(位於嘉義市)
移動機器人若能透過檢測實驗室執行客觀、可重複且符合標準的第三方性能測試,即可將原本由廠商自我宣稱的規格,轉化為具備可查證性的量測證據,使產品性能從「描述」走向「可驗證」。這種由第三方出具的測試結果,能有效降低採購端對性能的不確定性與導入風險,進而提升終端客戶對產品性能的信任與認同。同時,檢測實驗室不僅扮演驗證單位,更可透過研討會與技術交流,系統性分享性能檢測的核心要點與常見量測陷阱,協助業者在研發階段即建立正確的測試架構與量測方法,避免因不當量測造成反覆修正與誤判,從而縮短研發時程並提升開發效率。
精機中心移動機器人檢測實驗室位於嘉義市(如圖四)。該實驗室符合ISO 18646 所要求之檢測環境條件,包括溫度10 - 30°C、相對濕度0 - 80%RH、照度 100 - 1000 lx,以及地坪摩擦係數0.75 - 1.0。圖中呈現其場域規劃與測試配置;整體定位上,該實驗室可視為串接「標準方法—量測證據—市場導入」的關鍵節點,兼具產業應用推動與第三方驗證功能,為移動機器人進入市場提供更具公信力的支撐。
 圖四、移動機器人檢測實驗室
圖四、移動機器人檢測實驗室
在國際期刊的論述框架中,此類實驗室亦可被視為「第三方信任基礎設施(trust infrastructure)」。其價值不在於單純提供場地,而在於具備一套能支撐公信力的能力組合,包括:
- 標準方法落地能力:將ISO 18646的條文要求轉化為可操作的試驗流程(如試驗路徑設計、量測區配置、障礙物尺寸與角度或位置定義等)。
- 量測儀器與溯源體系:依循ISO/IEC 17025的精神建立儀器校正、量測不確定度評估、資料保存與可追溯性管理。
- 一致性與可重複性:確保不同時間、不同操作者仍能重現測試結果,並可對差異來源進行工程判讀與合理說明。
- 產業溝通與教育功能:將測試結果轉譯為採購、系統整合與研發皆能共同理解的指標與情境解釋,降低跨部門與跨供應鏈溝通成本。
換言之,位於嘉義市的移動機器人檢測實驗室不僅是「測試場」,更是一個能把標準、量測與市場需求有效串接的轉譯器:把研發語言轉為採購語言,把展示型證據轉為可審核的證據,進一步支撐品牌建立與跨場域導入的可行性。
平地移動特性
平地移動特性通常是客戶最直覺理解、也最常被寫入規格書的項目,但同時也是最容易因測試條件不同而被誤解的項目。ISO 18646-1 的價值在於:把「速度」、「停止」、「轉向」從模糊描述,改為有定義、有測法、有判定方式的性能指標。
額定速率
驗證意義
額定速率不只是最高瞬間速率,而是機器人在特定負載與控制模式下能否在一定距離內穩定達到並維持目標速率。對物流與製造而言,速率穩定性直接影響生產節拍;對人機共存場域而言,速率控制與限速策略亦影響安全與可預期性。
試驗配置與方法
額定速率測試中「量測區的長度至少大於 1m」,這個看似簡單的條件,其實回應了兩個常見問題:
- 若量測區太短,會把「加速段」或「減速段」誤當成穩態速度;
- 若量測區太短,任何感測延遲或取樣誤差都會被放大,造成速率估算偏差。
圖五呈現了典型的測試邏輯,即移動機器人由起點進入目標速度區,穿越量測區後離開,並以時間差或位置與時間資料推算速率表現。
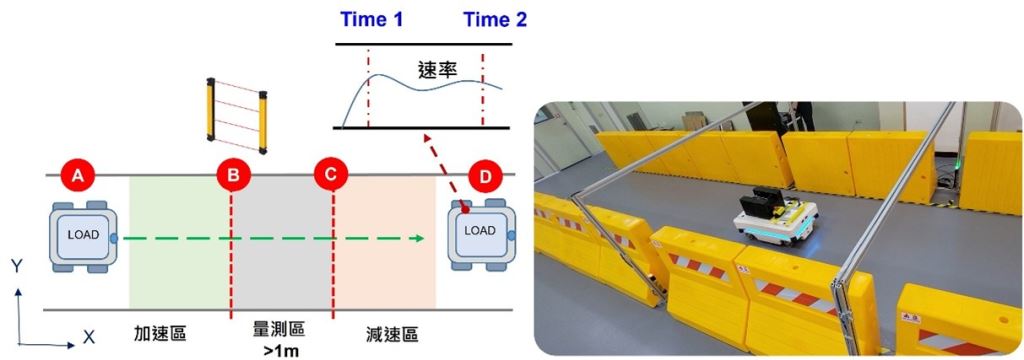 圖五、額定速率檢測
圖五、額定速率檢測
量測要點與常見陷阱
- 負載條件:同一機器人在空載與額定載重下速率可能不同,且加速性能也會改變;若要作為市場通行證,需明確揭露測試負載。
- 地坪條件:地坪摩擦、平整度與接縫會影響速度控制;標準化測試需定義地坪狀態,或至少在報告中描述地面材料與狀況。
停止特性
驗證意義
停止特性關乎安全與效率,停止距離越長,避障與人機共存策略就必須更保守;停止距離越短,若控制不當可能造成滑移、負載位移或輪胎磨耗。對導入端而言,停止行為的可預期性也是驗收焦點。
試驗配置與方法
這裡的關鍵在於停止測試若僅靠車載里程計或輪速推算,容易受到輪胎滑移、編碼器量測誤差、濾波延遲等影響;以外部量測系統(如雷射追蹤儀)可得到更接近真實軌跡的距離與時間資訊,並且更容易建立溯源與不確定度評估(如圖六)。
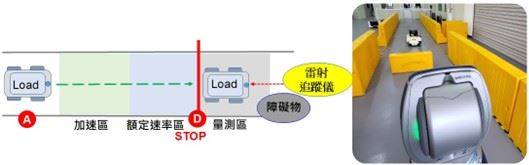 圖六、煞車停止檢測
圖六、煞車停止檢測
判定建議
- 煞車起點:建議定義為控制系統下達停止指令的時刻,或以速度曲線首次低於某閾值作為一致化判定。
- 停止完成:建議定義為速度降至接近0 m/s並維持一定時間(避免瞬間抖動造成誤判)。
- 報告呈現:除平均停止距離除以時間外,建議呈現多次試驗分布,作為重現性的證據。
經驗法則參考(研發)
室內場域中,導入實務常以額定速率下達停止指令後之停止距離 ≤ 0.4 m,作為研發階段的最低參考門檻之一。
備註:此為非標準要求之經驗值,僅供研發階段參考;建議於報告中同步揭露測試負載、行進速率與地坪摩擦條件,以利不同產品間比較。
轉向寬度
驗證意義
轉向寬度是場域適配的硬指標,在狹窄通道、工作站間距、電梯與門框,移動機器人往往是由「轉向需求」決定是否能導入。許多導入失敗不是速度不夠,而是「轉不過去」。
試驗類型與配置
轉向寬度檢測可分為 L 形轉向、U 形轉向、三點式轉向(或稱倒車轉向),如圖七所示;這樣的分類非常重要,因為不同底盤型式(差動、全向輪、舵輪、麥克納姆等)在不同轉向方式下的需求不同。
- L形轉向:對應走廊轉入支線的情境;
- U形轉向:對應端點迴轉、回頭的情境;
- 三點式轉向:對應有限空間下的倒車調整能力。
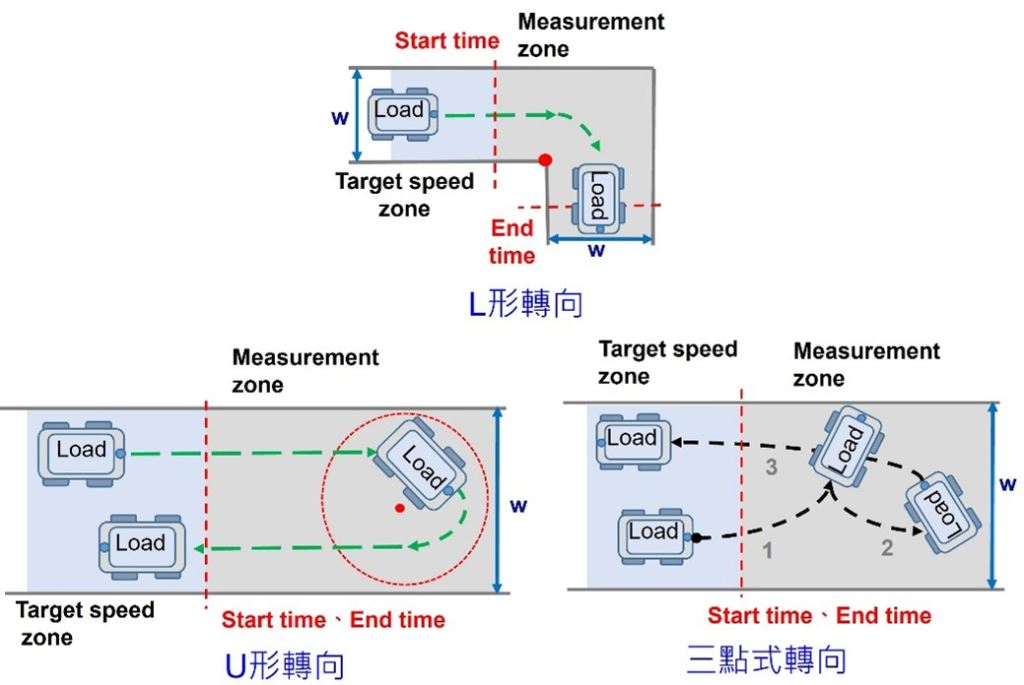 圖七、轉向寬度檢測
圖七、轉向寬度檢測
量測要點
- 路徑規劃一致性:若導航系統自動規劃路徑,應固定策略或以人工指令控制,避免不同次試驗路徑差異造成結果不可比。
- 安全距離設定:避障與安全距離會直接改變轉向所需空間,報告應揭露設定值,以便用戶判讀。
斜坡越障特性
在實務場域,移動機器人的「障礙」常常不是明顯的大障礙物,而是門檻、坡道、地坪接縫與新舊建築地面高度差等。圖八也明確指出常見障礙物來源為門檻與建築物間的地面高度差,斜坡越障特性因此是導入成敗的關鍵之一。
障礙物高度與地面高度差跨越能力
驗證意義
跨越能力反映底盤幾何設計(輪徑、離地高度、懸吊彈性、前後懸、導輪設計)、驅動扭矩與控制策略(爬升時的扭矩分配、打滑控制)。對客戶而言,這是「能不能進出」的門檻;對品牌而言,這是「是否真的能在現場跑」的可信度關鍵。
試驗配置
圖八描述了障礙物跨越與地面高度差跨越的檢測概念,並以門檻與地面高度差作為代表性案例(如圖八)。試驗時建議將障礙物高度以可調式模組(分級高度)實作,使跨越能力可用「最大可跨越高度」來呈現。
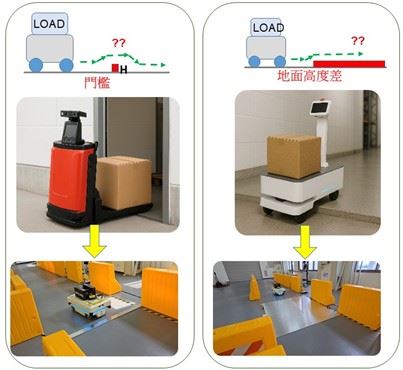 圖八、障礙物跨越檢測與地面高度差跨越檢測
圖八、障礙物跨越檢測與地面高度差跨越檢測
量測與判定建議
- 成功判定:不僅是跨過去,更要看是否造成底盤卡滯、負載傾倒風險、或需要多次嘗試。
- 重現性:同高度障礙需重複多次,避免偶然成功。
- 安全與貨物穩定:若應用含載運一定高度的貨物,建議可同步記錄貨物位移、傾角,讓跨越性能與應用安全同時被檢視。
經驗法則參考(研發)
室內場域中,導入實務常以機器人具備門檻或地面高度差跨越能力 ≥ 5 mm,作為研發階段的最低參考門檻之一。
備註:此為非標準要求之經驗值,僅供研發階段參考;建議於報告中同步揭露測試負載、行進速率與地坪摩擦條件,以利不同產品間比較。
可行進最大斜坡角度與斜坡上可行進最大速率
驗證意義
坡道能力不只決定「能不能上去」,也決定「上去時是否穩定且安全」。在地下停車場車道、貨櫃車卸貨斜坡架或門口斜坡等場域,坡道是常態需求(如圖九)。
試驗配置與方法
圖九呈現斜坡坡度與速率檢測概念:以斜坡角度 θ 與在坡道上可維持的最大速度作為指標。測試上可採兩種策略:
- 固定角度測最大可行進速率:在指定坡度下逐步增加目標速率,觀察是否打滑、失速、偏航、停止或觸發保護。
- 固定速率測最大可行進坡度:在指定目標速率下逐步增加坡度,得到最大可行進坡度。
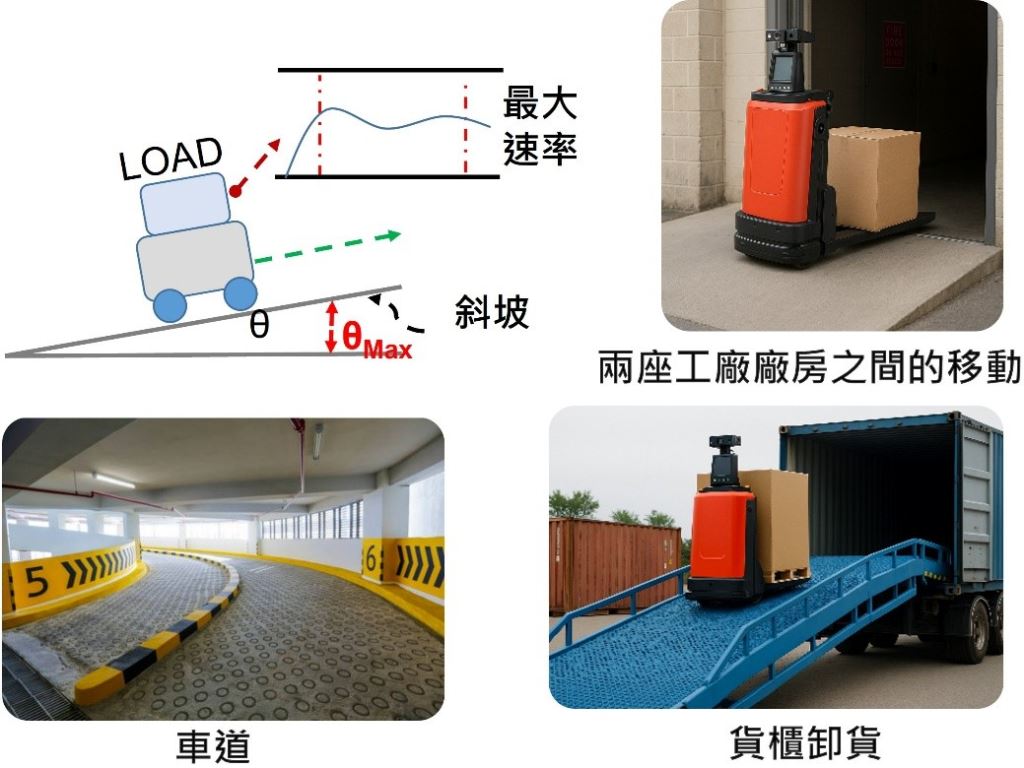 圖九、斜坡坡度與速率檢測
圖九、斜坡坡度與速率檢測
量測要點
- 輪胎打滑與抓地:坡道能力高度依賴摩擦係數。此處可連結到摩擦係數量測標準(如ISO 7176-13或對應CNS 14964-13)以建立地坪條件可追溯性,避免坡道結果因地面材質差異而不可比。
- 熱衰退與長時間負載:坡道連續行駛會造成驅動器與馬達溫升,建議額外補充「連續行駛時間/次數」與溫度條件,或將其列為加值觀察項目。
經驗法則參考(研發)
室內場域中,導入實務常以機器人具備可通行斜坡坡度 ≥ 3°,作為研發階段的最低參考門檻之一。
備註:此為非標準要求之經驗值,僅供研發階段參考;建議於報告中同步揭露測試負載、行進速率與地坪摩擦條件,以利不同產品間比較。
姿勢特性
姿勢特性(位置與方位)是移動機器人從「能走」走向「能作業」的關鍵。當移動平台要與工作站、充電點、輸送線或機械手臂協作時,定位誤差與重現性會直接影響任務成功率與生產節拍。圖十指出,姿態特性的好壞會影響移動精度,並將重現性與準確度拆分為:位置重現性、方位重現性、位置準確度、方位準確度;此外,測試路徑可分為直線、複合與矩形路徑。這些描述可直接延伸成國際期刊中常用的測試設計架構。
 圖十、姿態特性的影響
圖十、姿態特性的影響
姿態重現性與姿態準確度
姿態重現性與姿態準確度是移動機器人從「能移動」走向「能作業」的關鍵性能指標,特別是在需要精準停靠與協作的場景(如對接輸送線、入站充電、與機械手臂對位)中,兩者共同決定任務成功率、系統整合成本與長期運行的可靠性。此外,姿態特性的好壞會影響移動精度,並將評估拆分為位置與方位的「重現性」與「準確度」,且可透過直線、複合、矩形等不同路徑進行測試,以反映不同運動型態下的誤差累積與控制特性。
定義與驗證意義(為何要同時看兩者)
- 重現性(Repeatability)描述「在相同條件下重複執行,是否能回到同一位置或方位」。對工業客戶而言,重現性往往比絕對準確度更重要:即便存在固定偏差,只要偏差穩定且可校正,系統仍可透過標定或工裝補償維持穩定作業;反之,若重現性飄移,代表誤差具有隨機性或隨環境變動,將導致停靠失敗、重試次數增加、生產節拍下降,並使系統整合與維護成本顯著上升。
- 準確度(Accuracy)描述「到達位置或方位與真值之差」。當應用需要「一次到位」的精準停靠時,準確度會直接影響對位成功率、安全裕度與後續作業品質(例如對接機構卡滯、充電接點錯位、與機械手臂座標系不一致等)。
因此,重現性簡述是『會不會每次都一樣』,準確度簡述是『是不是到正確的位置』。在市場溝通上,這兩者對應到不同風險:重現性不足是「不可預期」,準確度不足是「不可達標」,都會削弱客戶對品牌的信任。
試驗類型與量測方法(如何把標準落地)
為同時評估重現性與準確度,建議以「路徑設計 × 重複測試 × 真值量測」的方式建立可比較、可追溯的數據。
路徑類型:直線、複合、矩形,如圖十一所示三種;
- - 直線路徑:主要檢驗里程記錄器、速度控制與直線追蹤誤差。
- - 複合路徑:混合直線與轉向,有助評估定位系統(如 SLAM)在特徵分布不均與動態環境下的穩健性。
- - 矩形路徑:放大轉彎行為造成的輪胎滑移、偏航與誤差累積,能更貼近倉儲/走道轉彎工況。
- - 備註: LU係指移動機器人外形尺寸中長度 L 與寬度 W 之最大值,用作定位精度與導航性能評估之特徵長度。
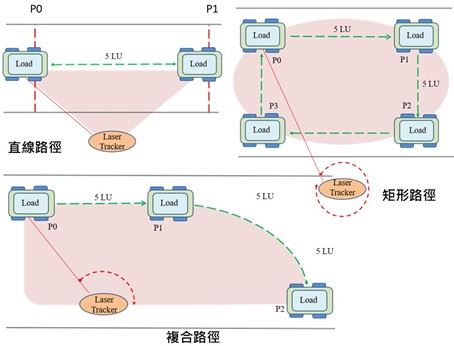 圖十一、姿態特性的檢測路徑
圖十一、姿態特性的檢測路徑
重複次數與統計:用分布表達重現性
同一路徑需進行多次往返,統計終點位置或方位的散布作為重現性指標。
控制條件固定:避免把設定差異誤當性能差異
速度、加速度、避障策略、定位模式(SLAM/反光板/磁條等)應固定,避免不同參數造成結果不可比。尤其避障的安全距離與局部規劃策略,會直接改變路徑形狀與終點姿態,若不揭露設定,將使數據解讀失真。
真值量測與準確度計算:外部量測系統的必要性
準確度的核心是「與真值相比」。在停止特性中提及可使用雷射追蹤儀量測煞車時間與距離,類似的外部高精度量測概念亦可延伸到姿態準確度評估:以外部真值系統建立地面真值,避免僅用車載估測造成「內部一致但缺乏外部真值驗證」的結果。在報告呈現上,建議同時提供:
- 位置誤差:x、y 分量或平面距離誤差
- 方位誤差:角度誤差
常見問題與工程判讀(發現問題時怎麼解釋)
姿態重現性與準確度的結果若不理想,往往可從「路徑型態」辨識原因:
- 直線重現性良好、但矩形路徑變差:常見原因包含轉彎時輪胎滑移、里程紀錄器累積誤差放大、地面摩擦不均或輪組機構間隙導致偏航。
- 複合路徑誤差快速累積:可能反映定位系統在回到已走訪區域時,回環偵測無法穩定建立正確的回環約束,使累積漂移難以被有效校正;亦可能與地圖品質不足或感測融合參數設定不當相關。
在第三方實驗室的情境中,這類判讀非常重要:它能把「數字不漂亮」轉換成「可改善的工程原因」,讓測試不只是驗收,更能反饋研發迭代。
從標準到市場語言:把誤差轉成「任務成功率」
若僅提供「準確度X mm、重現性Y mm」的單一數字,採購端或用戶端仍難以直接對應到自身流程風險。更有效的市場溝通方式,是將結果連結到任務允收門檻與達成率:例如在某停靠工位上,若允許對位誤差為±10 mm、±1°,即可呈現「在直線/矩形/複合路徑下的達成率(成功停靠比例)」。此做法能讓測試結果直接映射到客戶的作業需求、驗收條件與導入決策,進一步強化品牌公信力與跨場域複製能力。
經驗法則參考(研發)
室內場域中,導入實務常以機器人於目標點停靠/定位後之位置準確度 ≤ 5 mm,作為研發階段的最低參考門檻之一。
備註:此為非標準要求之經驗值,僅供研發階段參考;建議於報告中同步揭露測試路徑型態、測試速率、負載條件、地坪狀態與定位方法(如SLAM/反光板/磁條等),以利不同產品間比較。
環境感知與避障特性
當移動機器人進入人機共存與動態環境,單純的里程記錄器與固定路徑已不足以支撐可靠運行,感知與避障能力成為核心競爭力之一。
障礙物偵測
驗證意義
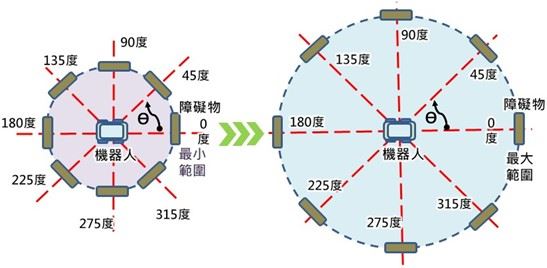
障礙物偵測能力涵蓋感測器視野、量測範圍、盲區、對不同材質或形狀的可檢出性,以及感測與融合演算法在噪聲與反射條件下的穩健度。偵測能力不足會導致碰撞風險;偵測過度則可能導致頻繁減速、繞行或誤停,降低效率。
試驗配置與方法
- 角度掃描:障礙物偵測的角度以每 45 度進行一次檢測,直至 315 度(如圖十二)。
- 距離範圍:以距離可分最小範圍與最大範圍(如圖十二)。
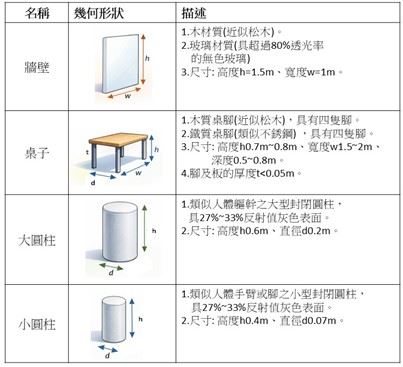
- 障礙物類型:牆壁、桌子、大圓柱、小圓柱(如表一)。
 圖十二、障礙物偵測的試驗配置
表一、障礙物類型
圖十二、障礙物偵測的試驗配置
表一、障礙物類型
報告呈現建議
- 以「偵測扇形圖」或「角度-距離可檢出區域」呈現,讓用戶能直觀看到盲區與有效範圍。
- 對不同障礙物材質與形狀分別呈現結果,因為這直接關係到場域中的常見物件(牆、桌腳、柱子、棧板角等)。
常見陷阱
- 若僅以單一類型障礙物(例如牆面或圓柱)測得的結果作為『偵測距離』宣稱,容易造成讀者誤解,因為不同障礙物在材質反射特性、截面尺寸與幾何形狀上的差異,會顯著影響感測器的可檢出距離與盲區範圍。
- 透明或低反射材質、細長物(如支架)與低矮物(如地面突出)往往是最難的情境,建議在標準測試之外建立加值測試項目,用於更貼近市場需求的證明。
障礙物迴避
驗證意義
避障不只是「繞開」,更是「在效率與安全之間做出可預期的決策」。終端使用者在意的是:遇到靜態障礙會不會卡住?遇到橫穿的人或車會不會急停或碰撞?遇到擋路障礙會選擇繞行還是等待?這些行為若不一致,就會造成導入端難以管理與信任下降。
試驗手法
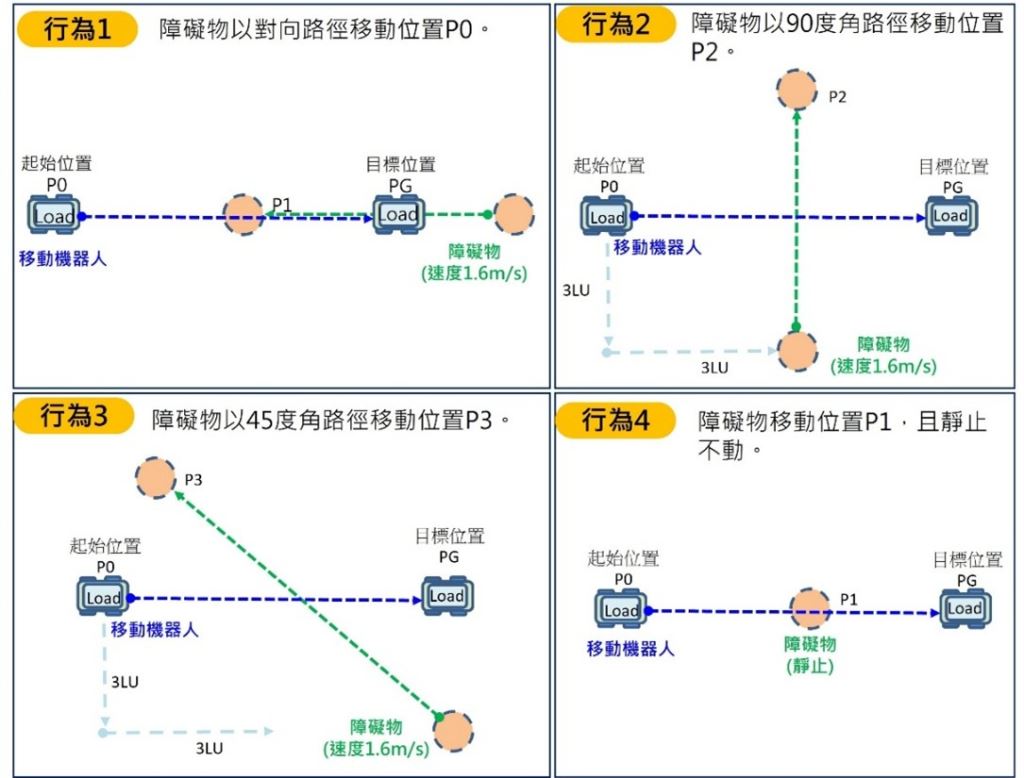
國際標準提供以下四個行為檢測(如圖十三):
- 行為1:障礙物置於起始位置與目標位置間之 P1 並保持靜止。
- 行為2:障礙物移至P2,以90度越過機器人路徑。
- 行為3:障礙物移至P3,以45度越過機器人路徑。
- 行為4:障礙物移至P1,擋住從P0到PG的直接路徑。
這四種行為覆蓋了靜態阻擋與動態橫穿兩大類典型情境,並對應到實務上最常見的導入風險,即靜態障礙導致繞行策略、動態橫穿導致急停或預測行為。
 圖十三、障礙物迴避的試驗配置與障礙物行為
圖十三、障礙物迴避的試驗配置與障礙物行為
量測與判定建議
- 成功率:完成任務到達目標的比例;
- 效率指標:繞行距離、繞行時間;
- 安全指標:距最小的人或物的距離;
- 行為一致性:同情境多次測試後,決策是否一致(例如有時繞行、有時等待)。
結論
移動機器人產業正快速邁向普及化與 AI 化,即感知更強、決策更複雜、場域更動態,導入也更深入企業流程。當應用從「單點試用」走向「跨場域複製」與「跨國供應鏈導入」,市場會自然要求更高等級的可驗證性。本文認為ISO 18646系列所代表的不只是測試方法,而是一張「邁向市場的通行證」。其價值可分三層:
- 技術層:把速度、停止、轉向、越障、坡道、姿態、感知與避障等指標定義化、流程化,使研發與迭代可量化。
- 交易層:把性能從口語宣稱轉為可比較的測試報告,降低採購端評估成本與導入不確定性。
- 信任層:透過第三方檢測實驗室的客觀量測與可追溯性,將「自我證明」升級為「外部背書」,形成品牌公信力的長期資產。
總結而言,當市場從「能不能做」轉向「能不能被信任」,標準化性能測試與第三方實驗室驗證就不再是額外負擔,而是品牌走向國際市場、跨越採購門檻與建立長期公信力的核心策略。
參考文獻
- [1] International Organization for Standardization, ISO 18646-1:2016 — Robotics — Performance criteria and related test methods for service robots — Part 1: Locomotion for wheeled robots. Geneva, Switzerland: ISO, 2016.
- [2] International Organization for Standardization, ISO 18646-2:2019 — Robotics — Performance criteria and related test methods for service robots — Part 2: Navigation. Geneva, Switzerland: ISO, 2019.
- [3] International Organization for Standardization, ISO/IEC 17025:2017 — General requirements for the competence of testing and calibration laboratories. Geneva, Switzerland: ISO, 2017.
- [4] International Organization for Standardization, ISO 7176-13:1989 — Wheelchairs — Part 13: Determination of coefficient of friction of test surfaces. Geneva, Switzerland: ISO, 1989.
- [5] Bureau of Standards, Metrology and Inspection (BSMI), Ministry of Economic Affairs, Taiwan, CNS 18646-1:2016 (B8023-1) — 機器人—服務型機器人之性能準則及相關試驗法—第1部:輪型機器人的移動. Taipei, Taiwan: BSMI, 2016.
- [6] Bureau of Standards, Metrology and Inspection (BSMI), Ministry of Economic Affairs, Taiwan, CNS 18646-2:2022 (B8023-2) — 機器人—服務型機器人之性能準則及相關試驗法—第2部:導航. Taipei, Taiwan: BSMI, 2022.
- [7] Bureau of Standards, Metrology and Inspection (BSMI), Ministry of Economic Affairs, Taiwan, CNS 14964-13:2006 — 輪椅—第13部:測試表面摩擦係數之測定. Taipei, Taiwan: BSMI, 2006.
- [8] Autonomous Mobile Robot Alliance (AMRA), AMRA-201:2023 — General Requirements and Test Methods for Mobile Robots. Taipei, Taiwan: AMRA, 2023.
- [9] Autonomous Mobile Robot Alliance (AMRA), AMRA-220:2022 — Safety Requirements and Test Methods for Mobile Robots. Taipei, Taiwan: AMRA, 2022.
- [10] Autonomous Mobile Robot Alliance (AMRA), AMRA-271:2025 — Communication Protocol between Mobile Robots and Elevators. Taipei, Taiwan: AMRA, 2025.
- [11] Taiwan Automation Intelligence and Robotics Association (TAIROA) and Autonomous Mobile Robot Alliance (AMRA), TARS/AMRA-300:2026 — Guidelines for Robot-Friendly Environments (RFE) in Mobile Robot Applications. Taipei, Taiwan: TAIROA & AMRA, 2026.