|
PMC驅控合一整合型關節模組與亞信電子合作,控制採用無感測器助力控制技術,透過內建的馬達助力控制器功能,即可偵測外部突發碰撞事件;馬達硬體採中空軸設計,搭配EthrCAT通訊技術,大大地簡化機器手臂關節中內部線路配置的複雜度,不僅提高空間利用率,也可大幅降低機器手臂設備維護的成本與難度。目前成功協助多家協作機器人大廠完成開發。
一、本模組四大特色
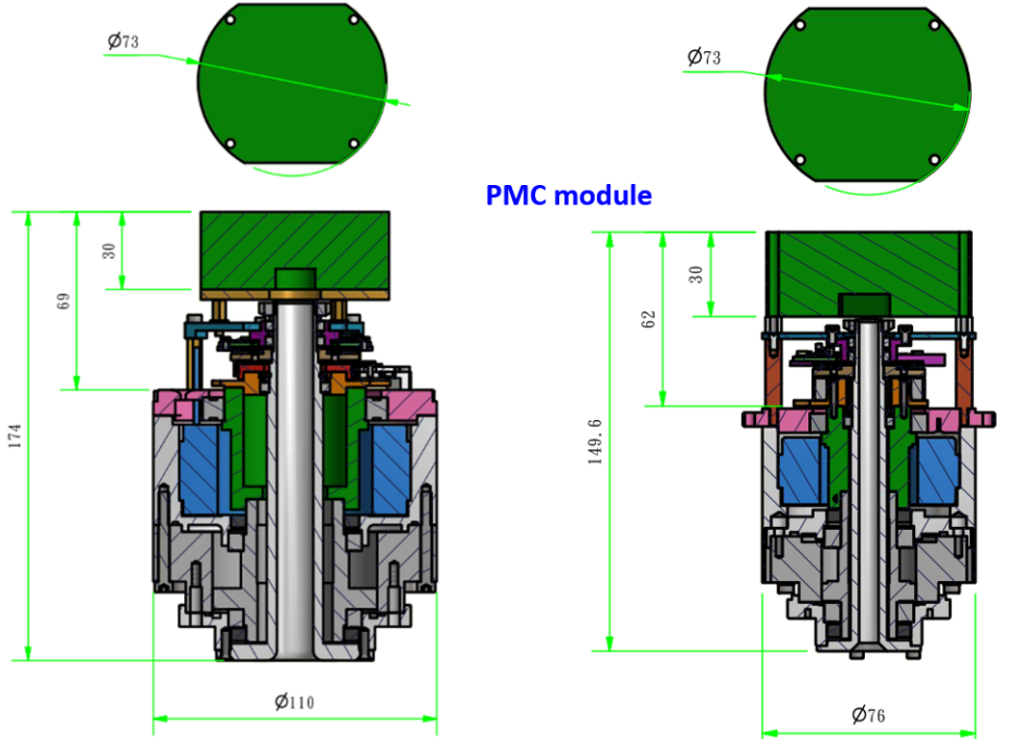
(一)體積精簡且減少配線數量
馬達硬體採中空軸設計,搭配EthrCAT通訊技術,大大地簡化機器手臂關節中內部線路配置的複雜度,不僅提高空間利用率,也可大幅降低機器手臂設備維護的成本與難度。
| |
 |
|
| |
圖一:400W關節100W關節體積精簡
|
|
| |
 |
|
| |
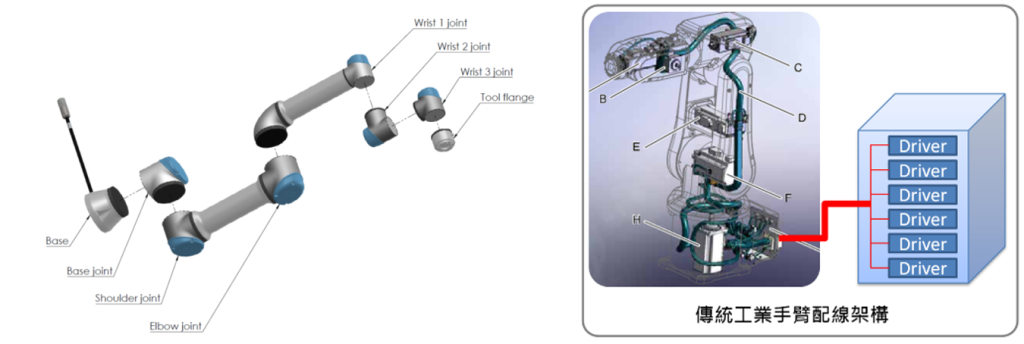
圖三:協作與工業手臂減少線材數量
|
|
(二)實現無感測器之驅動安全技術
機械手臂大致上可區分為剛性機械手臂、安全機械手臂與柔性機械手臂,三者可簡單分類為:
1.機械手臂: 強壯、可在惡劣環境工作、人不可接近。
2.安全手臂: 具感測器、安全、取代或偕同人一起工作、昂貴。
3.柔性手臂: 無感測器、安全、取代或偕同人一起工作、助力控制技術。
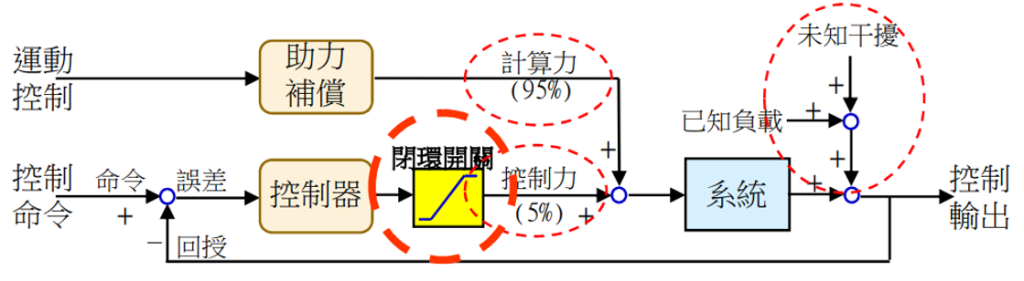
在助力控制系統中,力量可分為計算力與控制器,計算力是補償已知負載,而控制力是補償未知干擾(或負載),如圖一所示;已知負載為機械手臂自身重量,是事先可被評估與計算的,占馬達所需出力95%;而未知干擾(或負載)占馬達所需出力大約5%;因此在助力控制系統中設置閉環開關,用於偵測與限制與這未知干擾。例如系統閉環開關限制<10%,以下幾個狀態說明:
1.正常狀態下:控制力的出力<5%,系統將不會干擾機械手臂的正常運作。
2.異常狀態: 工作者伸手阻擋機械手時,系統會產生額外誤差而預計加大出力,但受到10%閉環開關的限制,系統無法提供更大出力,進而確保工作者的安全性、免於受傷。當控制力再度小於閉環開關限制時,系統即從異常狀態回復成正常狀態。
| |
 |
|
| |
圖三:助力控制系統
|
|
★本模組助力控制系統特色包括:
1.無須使用額定的扭力感測器,即可偵測扭力外來干擾阻力。
2.透過調整閉環開關,可調整手臂的助力/反抗力大小。
3.透過助力控制系統,操作員可用手輕易調整手臂姿態。
(三)具備人機協作安全性功能
本模組具備助力控制的關節模組可稱為柔性關節,他可確保操作員的安全性,並可使用於任何廠牌、規格的機械手臂系統;譬如當助力控制系統內的閉環開關設定10%時,代表馬達額外出力10%,以物理量而言,就是60W的馬達只剩6W的控制力量,這就是機械手臂變安全的來源;以從操作者的角度而言,機械手臂的抗拒力道從60W馬達降成6W馬達,這時候任何人自然用手就可以阻擋的運行了。
其中對於閉環開關可用程式彈性設置,也就是機械手臂的阻擋力道可以依據需求而自由調整。
二、關於驅控合一整合型關節模組設計結構與規格
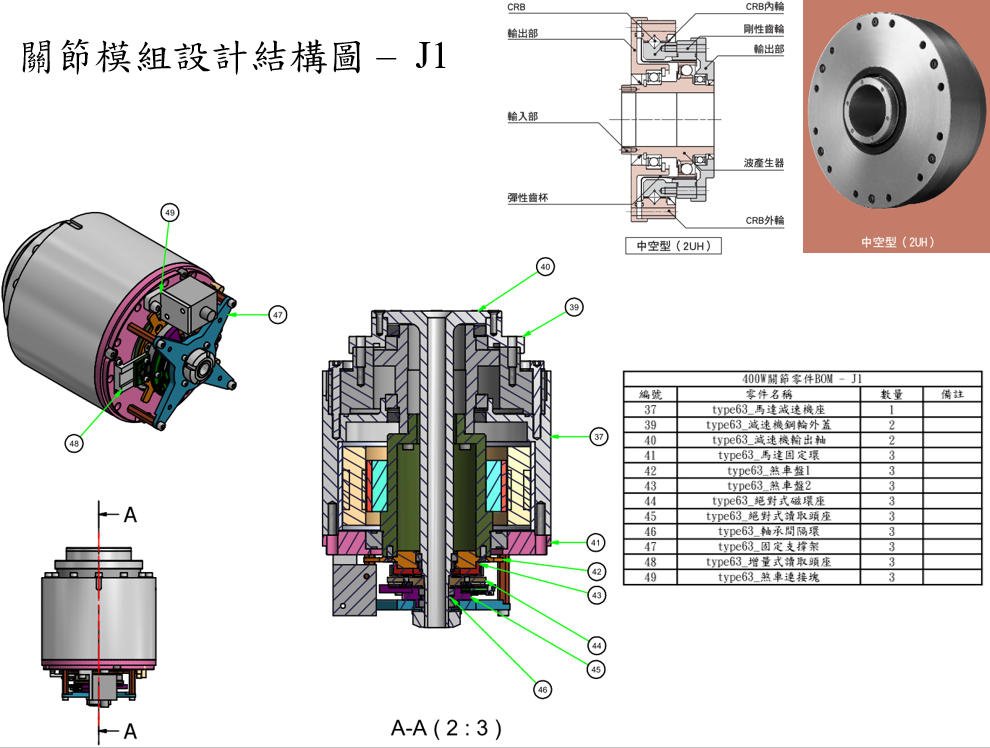
中空關節模組硬體設備或軟體特點包含整合馬達、諧和式減速機、絕對式與增量式旋轉編碼器、等元件以機構件組合,並整合控制板與電源供應模組。
| |
 |
|
| |
圖四:中空關節模組設計結構圖
| |
400W |
100W |
| 額定轉速(RPM) |
22 |
30 |
| 最高轉速(RPM) |
28 |
40 |
| 額定扭矩(Nm) |
112 |
18.9 |
| 最大扭矩(Nm) |
189 |
29.4 |
| 質量 |
4.6 |
2.1 |
| 通訊格式 |
EtherCAT |
| 電壓 |
48VDC |
|
|
三、PMC關節模組適用於所有的人機偕同合作的工作場域
PMC關節模組不僅內建無感測器助力控制技術,可直接應用於人機協作手臂開發,同時開放整合力量感測器,來獲取外界接觸力量的資訊,提供不同的應用設計彈性與選項。模組化設計也可讓手臂設計整合可更加精簡快速,協助應用端快速打造協作手臂產品。可應用於所有的人機偕同合作的工作場域,譬如組裝生產線。
四、成功協助多家協作機器人產業大廠完成開發
1.亞信電子公司(ASIX)
為一家整合型IC設計公司,包含IC設計、製造與行銷,開發的一系列網路通訊晶片,用於家電、可攜式裝置、工廠/大樓自動化、工業控制、保全系統、遠端監控管理、串流媒體、多媒體網路、高頻寬傳輸等領域。近年為了擴大經營範圍,以本身馬達驅動IC為基礎,與PMC合作開發馬達驅動器模組、手臂關節模組、機械手臂。
2.創博
創博為工業和教育機器人應用提供基於EtherCAT的開放式智能解決方案。 其產品包括功能完善的工業機器人系統的模塊化組件,範圍從控制器平台、機器人控制和模擬軟體、示教器、控制櫃到機器人主體。 與普通機器人一樣,協作機器人(cobot)也受到創博解決方案先進的機器人控制功能和軟件的支持。
聯絡窗口>>>
精密機械研究發展中心
智動化與機器人處
機器人技術部 副理 石承泰
連絡電話:04-23595968#728
|
|