▋ 研究動機
從1961 年第一台工業型機械手臂Unimation 發展至今,機械手臂已廣泛應用在各種自動化作業單元,機械手臂主要取代人力進行高重覆性及高危險性之自動化作業,例如銲接、搬運、上下料及簡單的組裝工作;但隨著業界研發與生產技術之進步,產品不斷的推陳出新,同時又必須滿足各種不同的市場需求,以增加產品的市佔率,因此高效率及少量多樣的自動化生產需求已經成為現代工業的重要發展趨勢。配合少量多樣的自動化生產條件,具備高應用彈性及高附加價值之工業型手臂已成為需求重點,傳統單臂架構機械手臂雖然可以透過動作編程的修改及末端端效器之更換,讓手臂進行各種不同需求的自動化作業,但受限於手臂自由度及靈活度的限制,面對多道次或是高複雜性的組裝加工作業,還是無法降低所需之組裝治具,並需設立多個組裝站來完成整個自動化作業,造成生產線之設備及換線成本的增加。
因應上述狀況,可預見不久將來雙臂型機器人會成為自動化產業的重要解決方案;雙臂機器人具備雙臂協同作業之特性,可進行複雜度較高的組裝作業,同時能夠減少多面組裝所需的夾治具,有效節省工作空間,降低生產線換線所需的時間及成本,適合少量多樣的彈性生產線。近年來,可以看到各國的手臂大廠皆已推出工業型雙臂機器人,如下圖案例等,因此就未來的機器人產業發展來看,雙臂型機器人已成為一個重要的發展趨勢。
▋ 研究目的及方法
以機械手臂取代人力一直是工業用機械手臂發展的目標,但受限於傳統單臂機器手臂的自由度及靈活度較低,始終無法比擬人類進行複雜度較高之作業,也常需要配合周邊設備,造成系統複雜且成本較高;人力之所以能夠進行各種複雜及靈巧的作業,其中一個關鍵在於雙手協同作業時的協調性及手臂的冗餘度(redundant),讓雙手能夠彈性進行各種靈巧的作業,如圖四所示;另外,如何與人同時在同一空間中互相搭配工作,已是重要發展趨勢。因此精密機械研究發展中心(以下稱精機中心)所開發的工業協作化雙臂機器人就是在這樣的思維架構下所誕生的新型態工業用機械手臂,兼具速度、精度,更可以提供數種安全機制與更友善的操作方式,來提升人機生產效率。
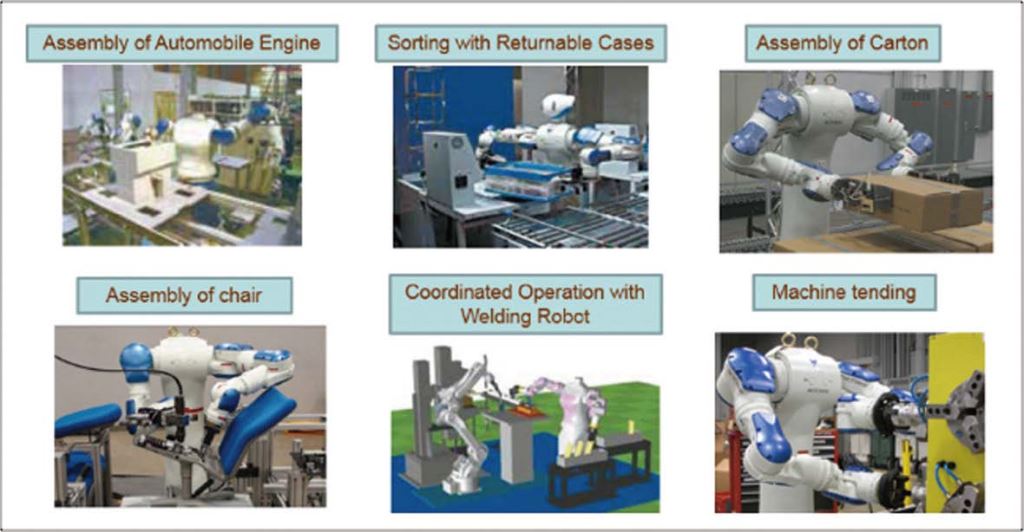
圖四、雙臂機器人可執行的各項任務
▋ 工業型協作化雙臂機器人系統
有鑑於未來的發展趨勢及需求,精機中心於2011 年開始著手進行雙臂機器人開發,如圖五所示。從高速數位通訊機器人控制器發展,帶領國內邁向全軟體控制器時代,除基本功能外並支援外部訊號動態追蹤、多機種偕同控制及CAD BASED 等進階功能,如圖六。另外從一開始7 軸構型採用泛用伺服馬達系統,高剛性結構設計及透過圖七可到達性分析技術來提供最佳化工作範圍。到了2020 年精機中心開始研製模組化整合式關節,整合國產馬達、高精度減速機、位置編碼器及國產驅動器,可就環境需求提供使用者彈性化組裝及更換,結合自主開發控制器並同步開發安全碰停、手拉教點等進階功能,提供業者完整工業協作化機械手臂解決方案。2021 年將工業協作化構型機械手臂整合成雙臂機器人,除基本安全機制外更搭配視覺安全軟體模組,透過安全區域偵測技術,動態調整機械手臂工作速度,確保人機協作環境安全性。以下會就工業型協作化雙臂機器人系統進行更詳細說明。
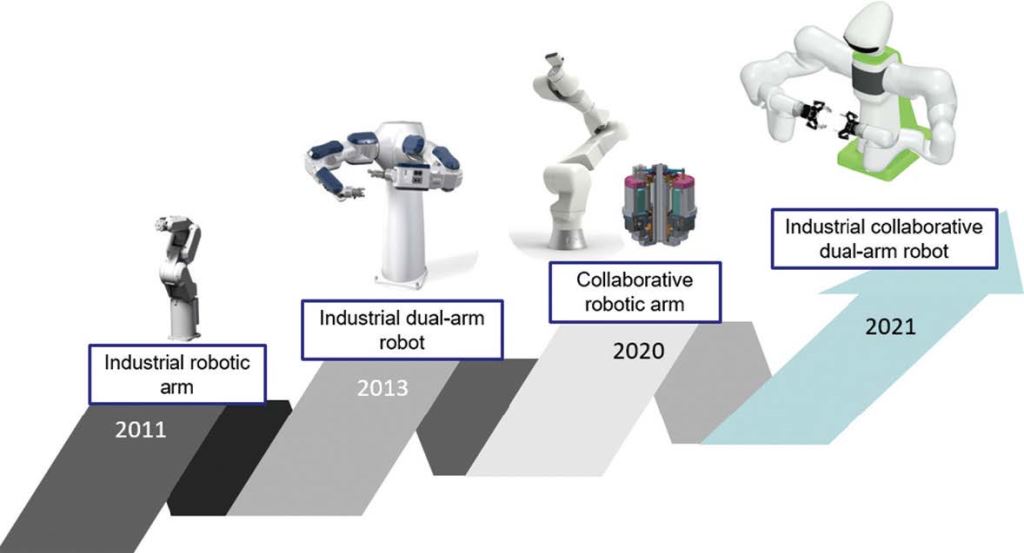
圖五、PMC 雙臂機器人技術發展歷程
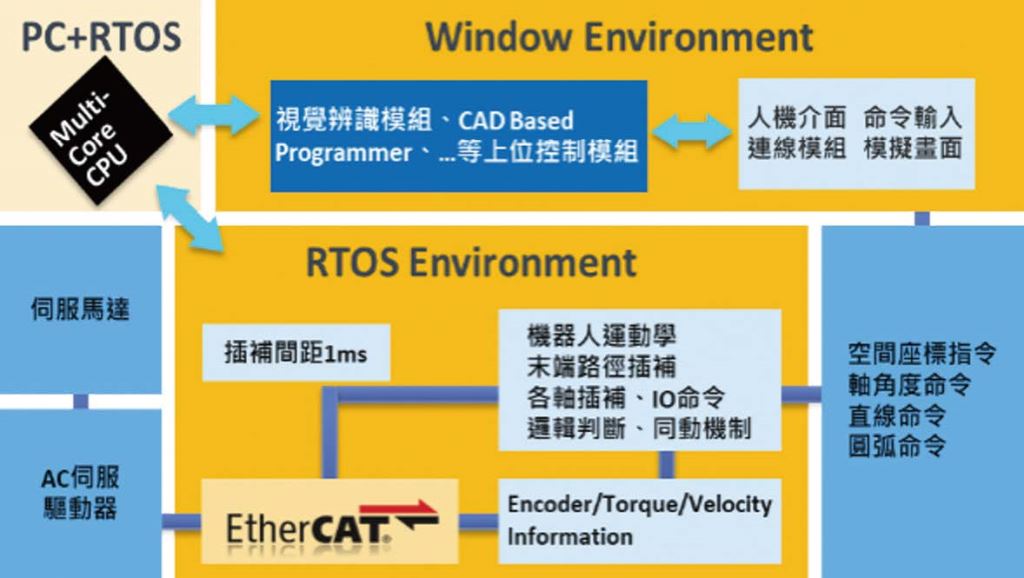
圖六、控制系統架構
精機中心所開發工業型協作化機械手臂,單臂由2 組750W 關節模組、2 組400W 關節模組及3 組100W 關節模組所構成,7 自由度設計可以讓手臂完成人所能完成的搬運、組裝動作。關節模組由國產中空馬達、諧和式減速機、增量與絕對式編碼器、剎車模組及驅動模組整合而成,圖十為實際100W 關節模組。設計上根據使用的規格與行程後先以模型計算出各軸所需慣量再求出扭矩,依此決定所需馬達容量大小與減速機減速比,模組規格如表一所示,模組採用48 VDC 與EtherCAT 通訊協定,圖十一為750W 實際量測額定轉速數值及波形,圖十二為400W 實際量測額定轉速數值及波形,圖十三為100W 實際量測額定轉速數值及波形,皆符合設計預估值。
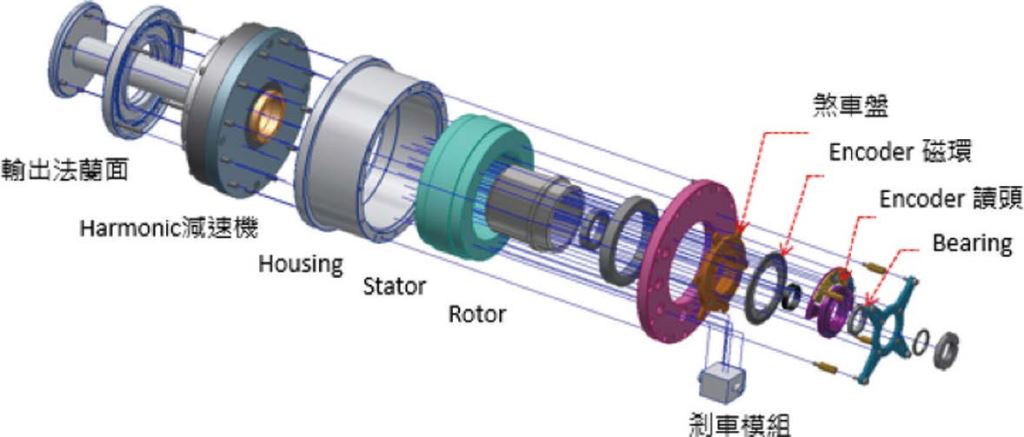
圖九、關節模組整合架構
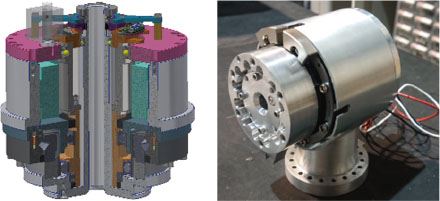
圖十、100W 關節實體
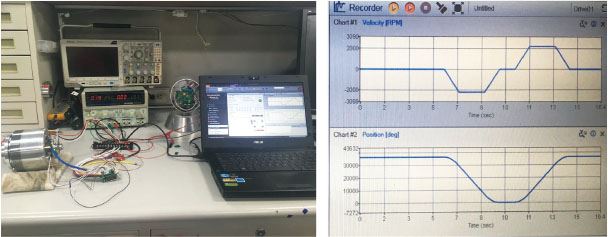
圖十一、第一軸(750W) 額定轉速2200RPM
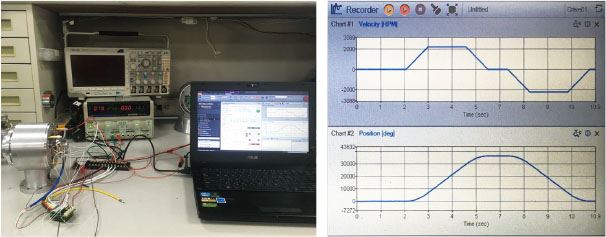
圖十二、第四軸(400W) 額定轉速2200RPM
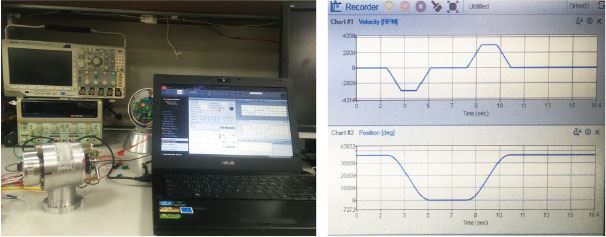
圖十三、第七軸(100W) 額定轉速3000RPM
基於傳統的驅動器只能非同步控制多顆伺服馬達,而近年來EtherCAT 通訊控制驅動器出現,簡化了許多設定與配線,以及同時同步多軸伺服控制馬達,對於使用者可加速開發過程及驗證成果,因此許多國際大廠紛紛投入整合EtherCAT 通訊功能的驅動器核心研發,可避免不同核心資料傳遞時容易受到雜訊干擾的問題,且改善資料傳遞速度受限的情形,並簡化驅動器電路面積。有鑑於此,圖十四為精機中心自主開發驅控器採用ASX58200 通訊核心晶片,整合PHY 至晶片核心內,可大幅縮減電路面積,MCU 尺寸為10*10mm,採BGA 封裝,電路板為六層板,驅動器整體最大尺寸為73 mm*73 mm*40 mm,驅動電壓為DC 48V,連續電流為10A,控制切換頻率為20KHz,具有位置、速度、電流環控制、過電壓偵測、過電流保護、溫度偵測及瞬間電壓保護功能,進一步實現精機中心機械手臂於無感測器安全防護技術。
驅控器動作原理藉由EtherCAT 接收控制器命令,透過 PDO 的通訊方式,讓所有致動器在每一個通訊週期都有一筆新的指令,讓運動軸在該週期內各自運行此一命令;藉此,達到單軸運動或多軸差補運動的功能,驅動電路透過MCU 傳遞PWM 於GATE Driver 控制MOSFET 開關,讓a、b、c 產生各相差120 度弦波訊號,使馬達控制運轉位置,同時藉由電流感測器偵測電流是否超出瞬間最大電流,避免馬達燒毀。此外圖十五三環控制系統建構於微處理器,由位置、速度、電流環所組成,圖十六為電流環測試波形,圖十七為速度環測試波形,圖十八為位置環測試波形。當控制器下達位置命令,馬達在最大負載情況下,藉由速度環的控制,維持額定轉速,同時藉由電流環的控制,維持額定扭力,圖十九為各軸於閉迴路控制波形測試。
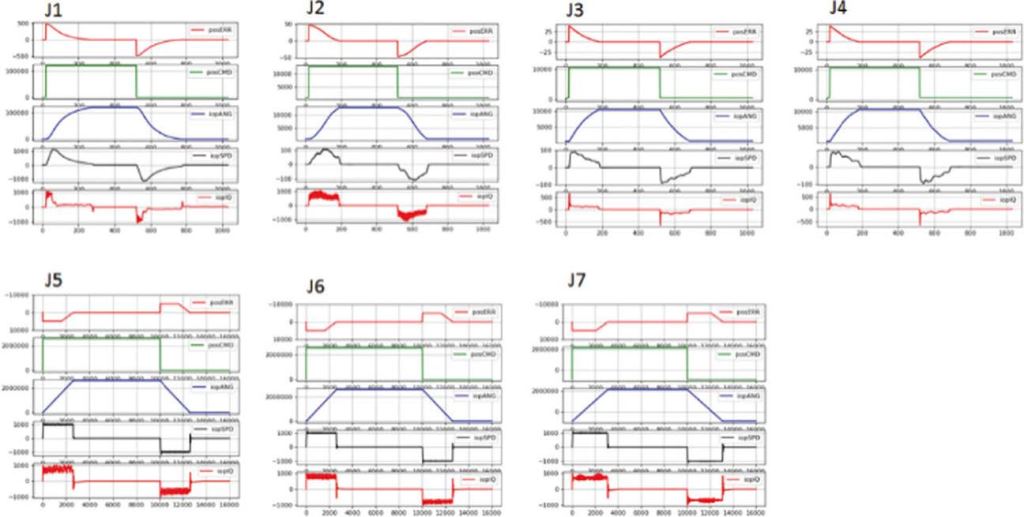
圖十九、各軸增量(iopREL)/ 絕對式(iopABS) 編碼器閉迴路測試
圖二十由2 組工業型協作化機械手臂所構成,前三軸用來支撐及控制機械臂(arm),它主要決定了手(hand,tool orend-effector) 及腕(wrist) 在空間的位置;後三軸不含手構成了腕(wrist),它主要決定了手的擺置方式(姿態)。雙臂機器人由4 組750W 關節模組、4 組400W關節模組及6 組100W 關節模組所構成,搭配鋁擠結構組成身體,總共14 個自由度,外型採用流線/ 圓潤特色設計,圖二十一為工作範圍及尺寸圖,表二為雙臂機器人規格及實際量測值。

圖二十、工業型協作雙臂機器人實機
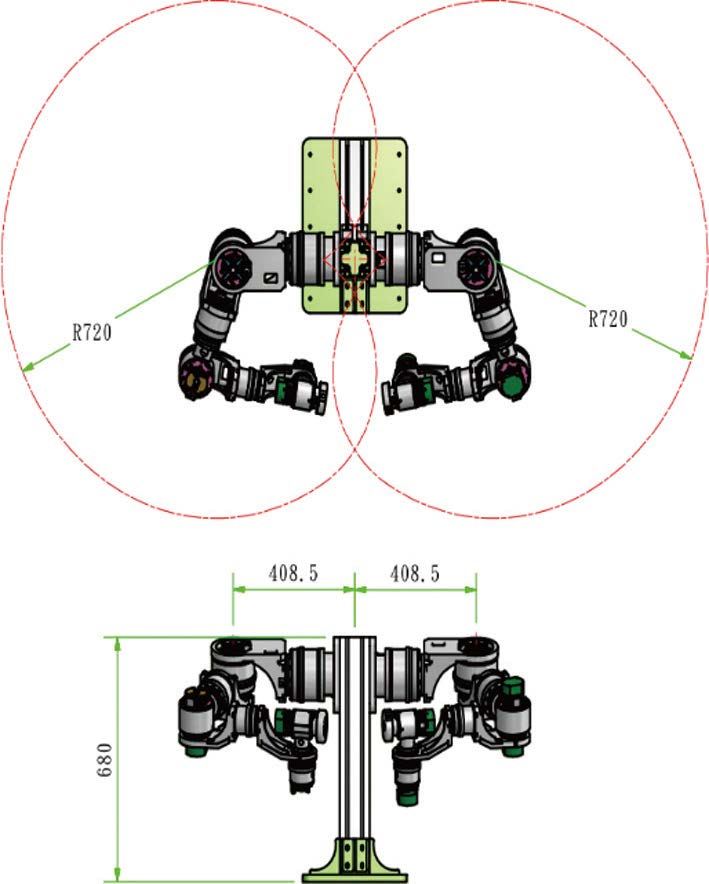
圖二十一、雙臂機器人工作範圍及尺寸
▋ 應用案例
2021 年PMC 於台灣機器人與智慧自動化展上以工業型協作化雙臂機器人搭配AMR 展示刀具運送自動化系統,利用iCAPS 作為上位派工系統,依據送還刀指令,協調雙臂機器人及AMR進行動作。雙臂機器人位於刀具拆裝區,依據刀具需求清單,從刀倉抓取刀,接著將刀具、端蓋、刀盒分離,下一步分別將刀具、端蓋、刀盒放置於各自的暫存區,AMR 位於輸送區,依據送刀需求清單,將暫存區上的刀依序放於車上並移動至工具機,再返回拆裝區,將車上的刀依序放回暫存區,等待下一組送刀命令,如圖二十二示意。
此外搭配安全區域偵測技術,依據人員速度及人員行為意圖預測進行機械手臂自主降速和停止,此舉不僅可以避免人員與機械手臂於協作空間內碰撞,並可以改善機械手臂因反覆急停導致重新啟動後能量損失狀況,符合未來低碳化趨勢。
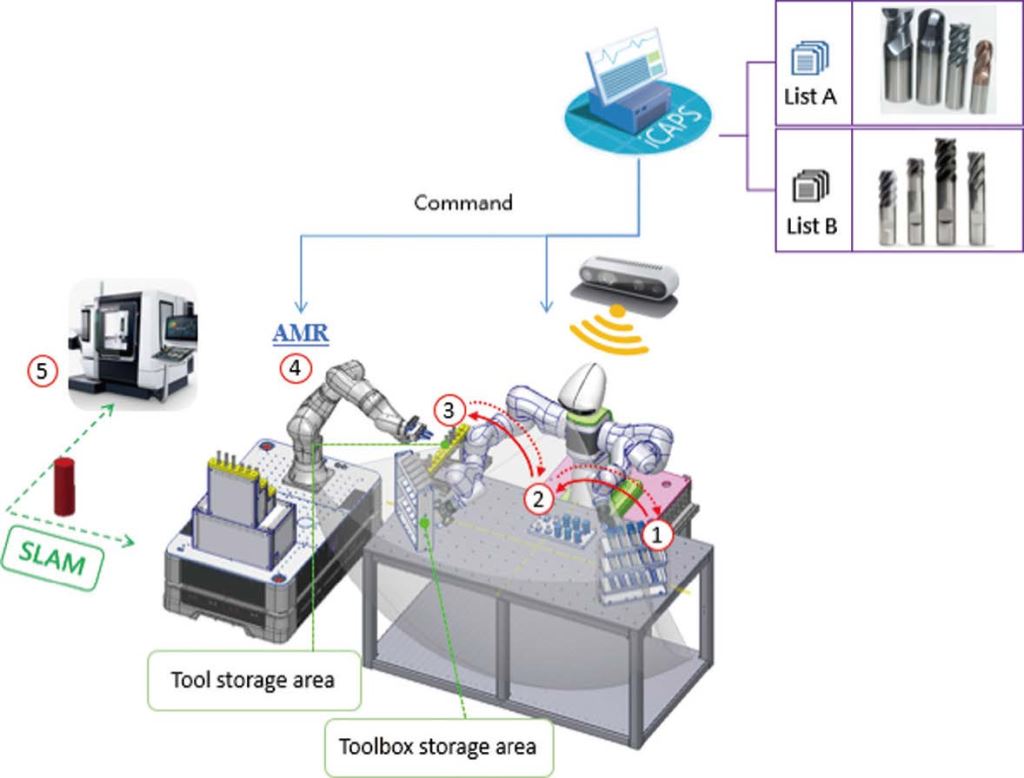
圖二十二、自動化工件運載系統情境

圖二十三、自動化工件運載系統展示實機
▋ 結論及未來發展
目前開發的雙臂機器人應用已經呈現出機器人的靈活性和協作能力,能獨立完成高複雜度和多工序的組裝任務,例如引擎或辦公椅的組裝。隨著智慧技術的持續發展,小批量、多樣化生產的需求日益增加。對於3C 產業來說,導入雙臂機器人進行自動化生產將是重要的解決方案。然而,面對不斷變化的產品設計和高精度組裝要求的嚴格條件,機器人在生產中很難完全取代人類勞動力。因此,自動化產業未來必然朝向人機協同作業的樣態發展。