| |
A Human-Robot Collaborative Motion Intention Detection System and a Human-Robot Collaboration Motion Intention Prediction System, both designed as active safety solutions to enhance operational efficiency and ensure workplace safety.
Key aspects of these systems include:
• Real-time Detection and Adaptive Control:
The system detects human posture and robot intent in real-time, allowing for adaptive speed control and safety alerts. This contrasts with older methods that rely on fixed safety distances where robot speed only reduces upon personnel entry.
• Human Motion Prediction:
The system utilizes a Human Motion Prediction Algorithm and a Simplified Human Pose Model to predict human pose and motion. By monitoring human movement speed and direction, the robot can predict the distance for the next second, which extends the time available for machinery to implement safety measures.
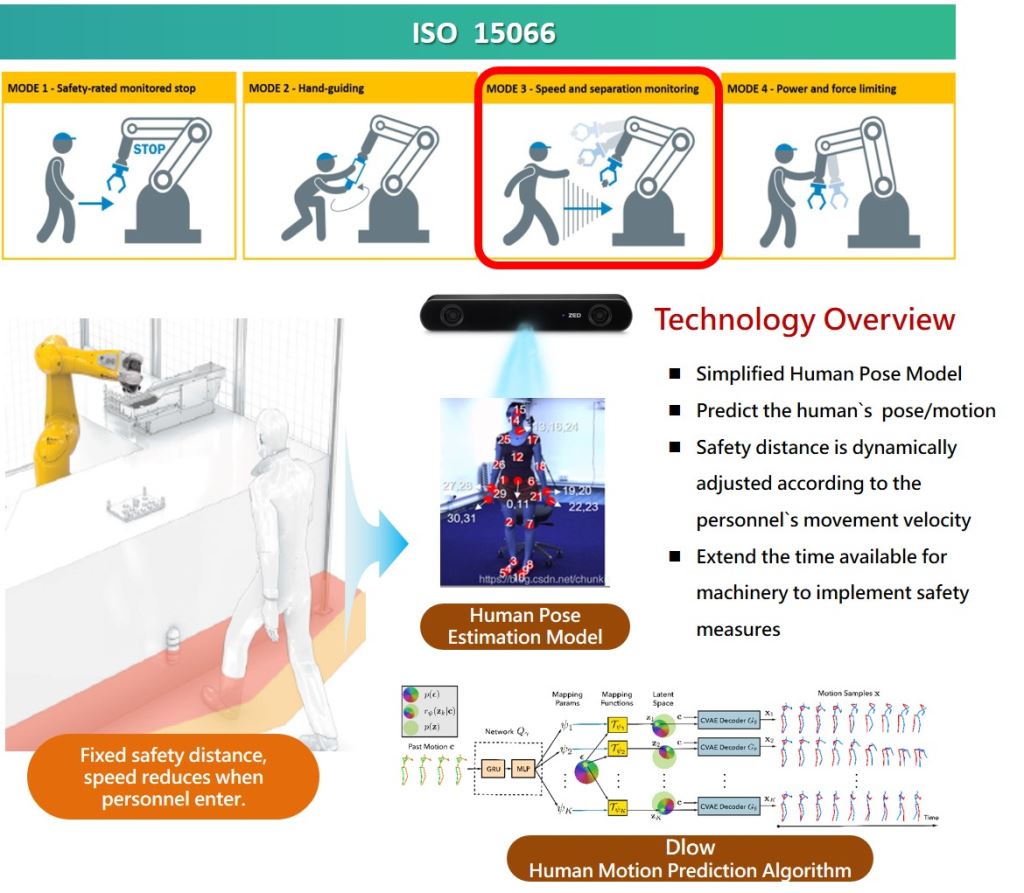
• Dynamic Safety Distance:
The safety distance between the human and robot is dynamically adjusted according to the person's movement velocity.
• Camera Module Configurations:
The system offers different camera configurations, each with specific monitoring capabilities:
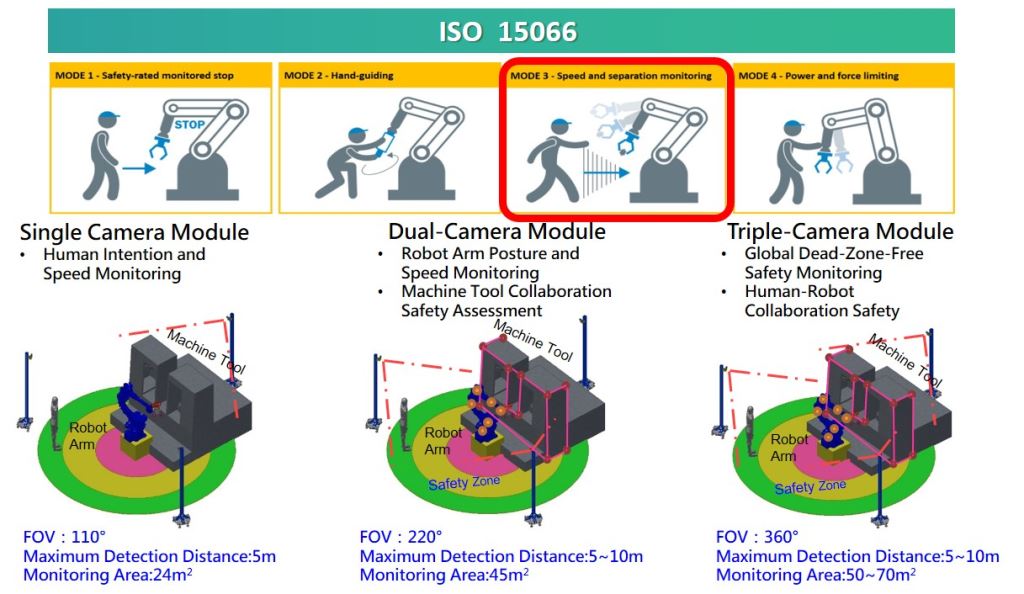
◦ Single-Cam:
Monitors human motion intentions and speed, focusing on human intention and speed monitoring. It has a Field of View (FOV) of 110°, a maximum detection distance of 5m, and a monitoring area of 24m².
◦ Dual-Cam:
Monitors both human and robot behaviors, aiming to reduce unnecessary robot stops while maintaining productivity. It monitors robot arm posture and speed, and facilitates machine tool collaboration safety assessment. It has an FOV of 220°, a maximum detection distance of 5-10m, and a monitoring area of 45m².
◦ Triple-Cam:
Adds tool machine door state detection to prevent collisions and equipment damage. It provides global dead-zone-free safety monitoring and is used for human-robot collaboration safety. It boasts an FOV of 360°, a maximum detection distance of 5-10m, and a monitoring area of 50-70m².
• Application Scenarios:
These technologies are applicable in various scenarios and comply with ISO 15066 standards for collaborative robots.
The systems are developed by the Precision Machinery Research & Development Center (PMC), specifically their Department of Intelligent Automation and Robotics, offering services such as technical counseling and technology transfer.
 |
|